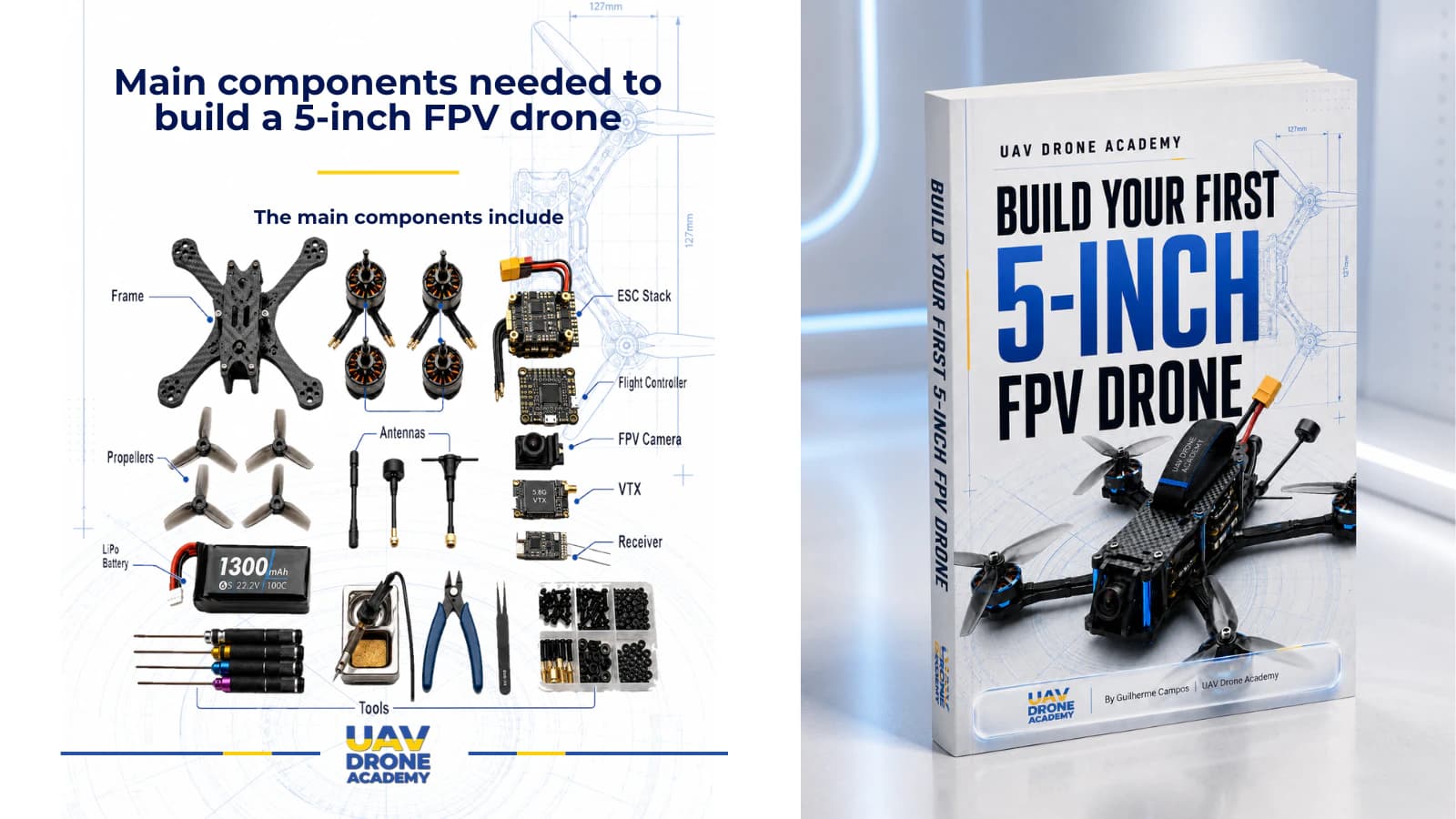
By now, you already understand the major components inside an FPV drone.
But understanding the parts individually is only the beginning.
The next step is understanding something even more important:
How all those systems work together during flight.
What actually happens when the pilot moves a stick on the radio controller?
How does that movement become motor rotation?
How does the drone stabilize itself in the air?
How can it react almost instantly to pilot commands?
These are the questions we will answer in this chapter.
Do not worry about memorizing every technical detail.
The goal here is much simpler:
Build a clear mental model of how an FPV drone operates in real time.
Once you understand this process, FPV drones stop feeling mysterious and start making logical sense.
The Core Principle of FPV Flight
An FPV drone flies because it constantly performs one fundamental process:
Receive → calculate → react
This happens continuously thousands of times every second.
The drone:
- receives pilot commands
- measures its own movement
- calculates corrections
- adjusts motor speed
- stabilizes itself in real time
This loop never stops while the drone is armed.
Step 1 — Pilot Input
Everything starts with the pilot.
The pilot controls the drone using the radio controller.
The four main control axes are:
Throttle
Controls total motor power and altitude.
Roll
Tilts the drone left or right.
Pitch
Tilts the drone forward or backward.
Yaw
Rotates the drone left or right.
These four controls form the foundation of FPV flight.
What Happens When You Move a Stick?
When the pilot moves a stick:
- the radio controller converts that movement into digital signals
- those signals are transmitted wirelessly
- the receiver inside the drone receives the commands
- the flight controller interprets the information
This entire process happens almost instantly.
Modern FPV systems operate with extremely low latency.
That is one reason FPV drones feel so responsive.
Step 2 — The Receiver Receives the Signal
Inside the drone, the radio receiver constantly listens for commands from the pilot.
In our build, we will use:
ExpressLRS, also known as ELRS
because it provides:
- low latency
- excellent range
- reliable communication
- modern protocol support
The receiver forwards pilot commands directly to the flight controller.
Step 3 — The Flight Controller Processes Everything
The flight controller is the drone’s brain.
This is where the most important calculations happen.
The flight controller constantly processes:
- pilot inputs
- gyroscope data
- accelerometer data
- flight conditions
- stabilization calculations
It then decides how fast each motor should spin.
This process occurs continuously and extremely fast.
Modern flight controllers perform thousands of calculations per second.
The Drone Is Constantly Trying to Stabilize Itself
This is one of the most important concepts in FPV.
Even when the pilot does nothing, the drone is still actively working.
The flight controller constantly checks:
- orientation
- movement
- rotation
- instability
Then it automatically adjusts motor speeds to maintain control.
Without these corrections, the drone would instantly tumble out of the air.
Understanding the Gyroscope
The gyroscope is one of the most important sensors inside the drone.
It measures rotational movement on multiple axes.
The gyroscope tells the flight controller:
- how fast the drone is rotating
- in which direction
- how the drone is moving in space
This information allows the flight controller to stabilize the aircraft in real time.
Step 4 — The Flight Controller Sends Commands to the ESC
Once calculations are complete, the flight controller sends commands to the ESC.
Remember:
ESC = Electronic Speed Controller
The ESC controls how much electrical power reaches each motor.
This allows the drone to:
- increase thrust
- decrease thrust
- stabilize itself
- maneuver precisely
Step 5 — The ESC Powers the Motors
The ESC rapidly changes motor speed based on flight controller commands.
This happens incredibly fast.
Motor speed changes occur many times every second.
That is why FPV drones feel:
- agile
- responsive
- precise
Step 6 — The Motors Spin the Propellers
The motors rotate the propellers.
The propellers push air downward.
This creates thrust.
And thrust is what allows the drone to fly.
The faster the propellers spin:
- the more thrust is generated
- the more lift the drone produces
How the Drone Moves
Now comes one of the most interesting parts.
FPV drones move because the flight controller changes motor speeds independently.
The drone does not have:
- wings
- flaps
- steering systems
- moving aerodynamic surfaces
Everything is controlled purely through motor speed adjustments.
Hovering
To hover:
All motors spin at nearly equal speed.
The drone maintains balanced lift.
Moving Forward
To move forward:
- the rear motors spin faster
- the front motors spin slower
This tilts the drone forward.
Once tilted, thrust pushes the drone forward.
Rolling Left or Right
To roll:
- motors on one side increase power
- motors on the opposite side reduce power
This tilts the drone sideways.
Yaw Rotation
Yaw movement happens by balancing rotational forces between clockwise and counterclockwise spinning motors.
The flight controller carefully adjusts motor torque to rotate the drone left or right.
Why FPV Drones Feel So Different
Traditional camera drones try to:
- stay level
- self-correct aggressively
- prevent rapid movement
FPV drones are designed differently.
They prioritize:
- direct pilot control
- responsiveness
- agility
- precision
This creates a much more immersive and dynamic flight experience.
The drone reacts almost immediately to pilot input.
That feeling is one of the reasons people become passionate about FPV flying.
Flight Modes Explained
Modern FPV drones support different flight modes.
These modes change how much stabilization assistance the drone provides.
Angle Mode
The drone self-levels automatically.
This is easier for beginners.
However, movement becomes more restricted.
Horizon Mode
A hybrid between stabilized and acrobatic flight.
It provides partial self-leveling.
Acro Mode
Acro Mode is also known as Manual Mode.
This is the standard FPV mode used by experienced pilots.
The drone does not self-level.
The pilot has full manual control.
This allows:
- freestyle flying
- flips
- dives
- advanced maneuvers
Eventually, most FPV pilots move to Acro Mode.
Why Latency Matters
FPV flight depends heavily on low latency.
Latency is the delay between:
- pilot input
- drone response
- video transmission
High latency makes FPV difficult and uncomfortable.
That is why modern systems focus heavily on:
- fast communication
- fast video transmission
- fast flight controller processing
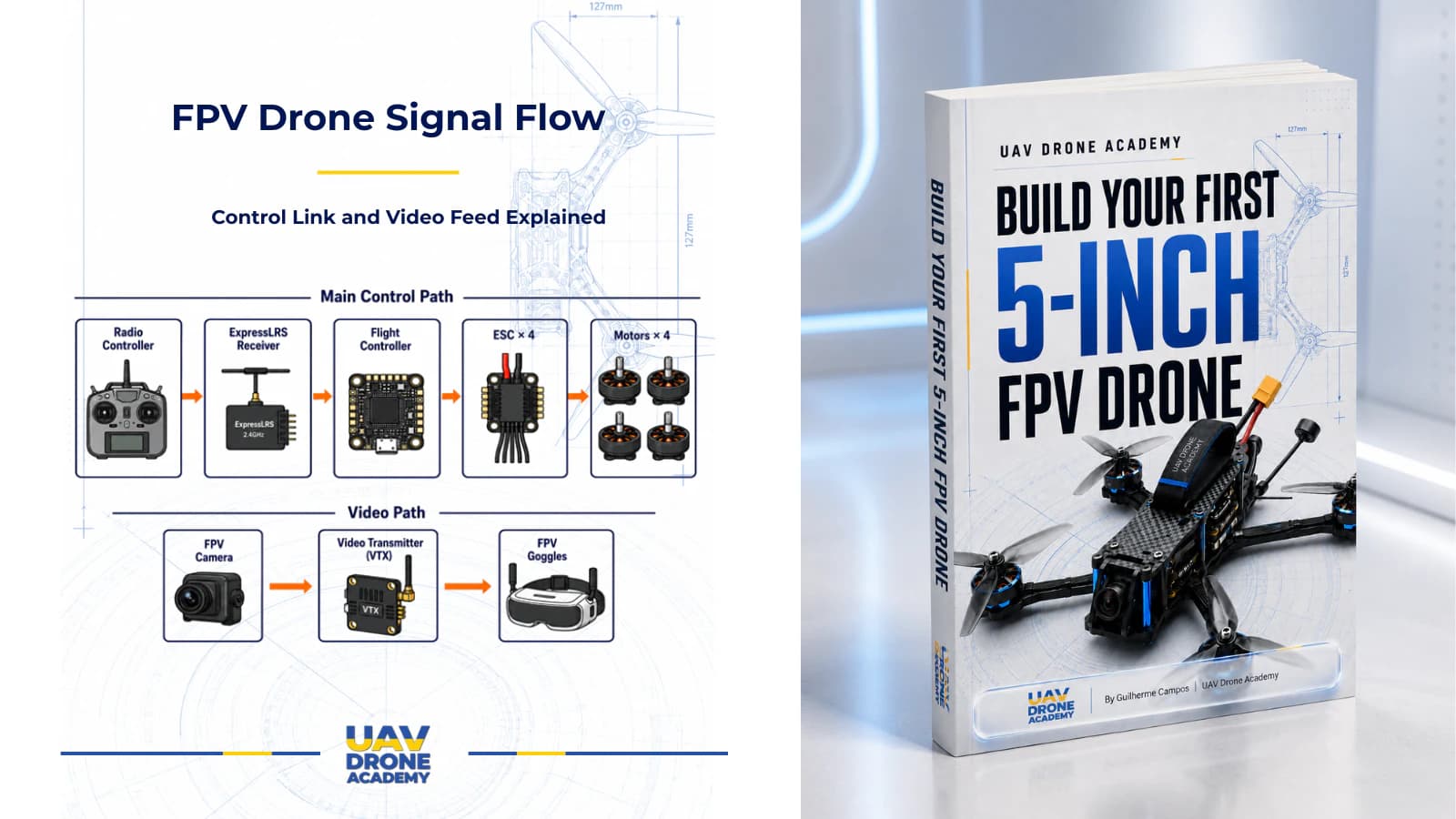
The Continuous Control Loop
Now let’s simplify the entire process.
While flying, the drone continuously performs this loop:
- Pilot input
- Receiver receives commands
- Flight controller processes information
- Gyroscope measures movement
- Flight controller calculates corrections
- ESC adjusts motor speed
- Motors spin propellers
- Drone reacts
- Gyroscope measures new movement
- Loop repeats thousands of times per second
This is the heart of modern FPV flight.
Why Understanding This Matters
Many beginners try to learn FPV only through:
- tutorials
- copy-paste settings
- random YouTube videos
But when something goes wrong, they feel lost.
Understanding the control process changes everything.
Once you understand:
- how commands travel
- how stabilization works
- how motor control works
you begin thinking like a system builder instead of just a drone user.
That is one of the biggest goals of this series.
Common Beginner Misunderstandings
“The Motors Directly Follow the Sticks”
Not exactly.
The flight controller constantly modifies motor behavior to stabilize the drone.
The motors respond to both:
- pilot input
- stabilization calculations
“The Drone Flies Automatically”
FPV drones require constant pilot control.
Especially in Acro Mode.
The pilot actively controls the aircraft at all times.
“More Power Automatically Means Better Flight”
Excessive power can actually make learning harder.
Control and consistency matter more than raw speed for beginners.
That is why our build focuses on a balanced beginner-friendly setup.
Conclusion
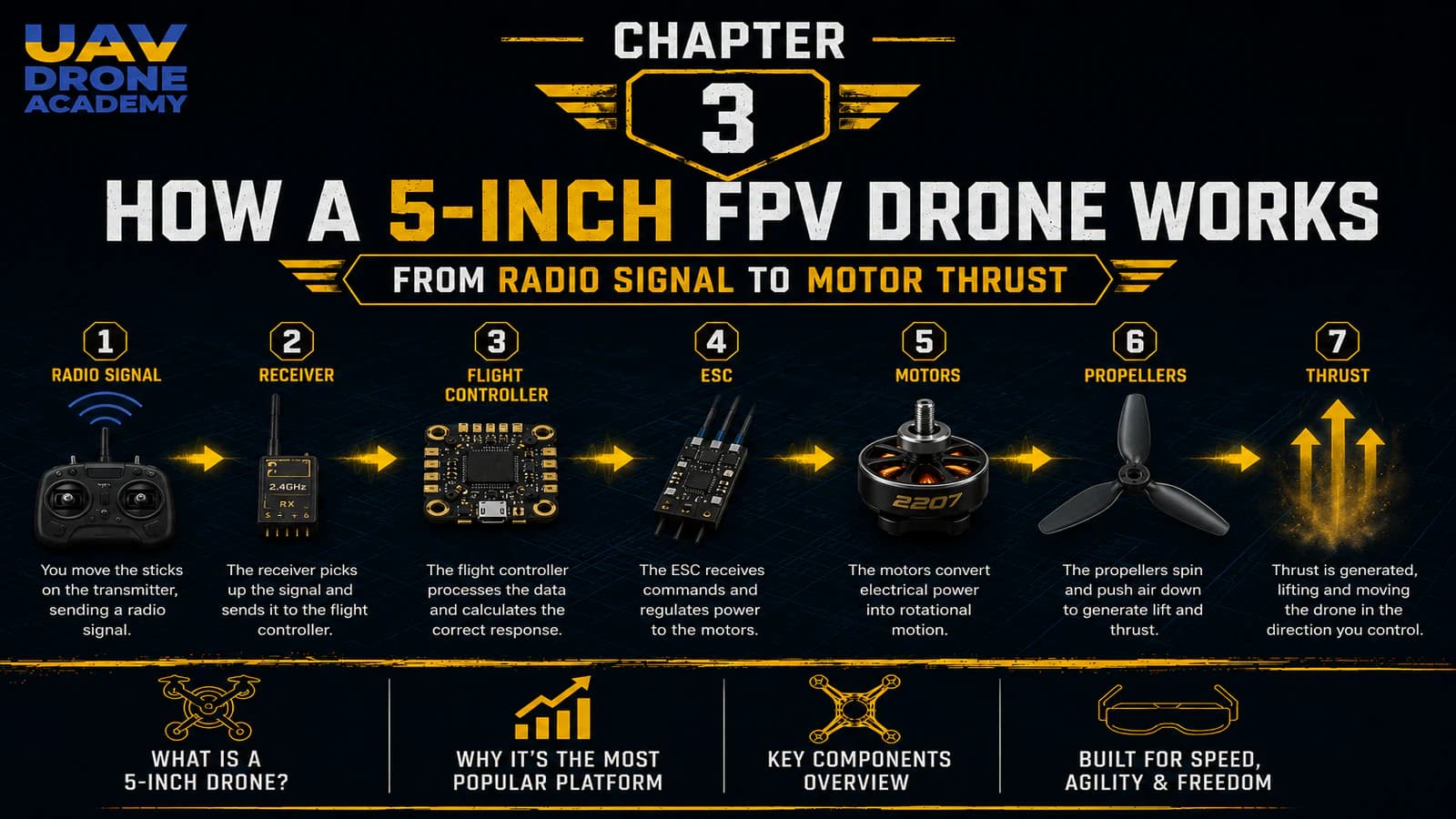
A modern FPV drone is an incredibly fast real-time control system.
Every movement begins with the pilot, travels through the communication system, gets processed by the flight controller, and finally becomes motor thrust.
This entire loop happens continuously thousands of times every second.
Once you understand this process, FPV drones stop feeling like complicated machines and start becoming logical systems you can understand, troubleshoot, and eventually master.
Now that you understand how FPV drones actually work, the next step is understanding the different flying styles and how they influence drone design choices.
In the next chapter, we will explore the major FPV categories and understand the differences between:
- freestyle
- racing
- cinematic
- long-range FPV
Next Chapter
Freestyle, Racing, Cinematic, and Long Range: Choosing the Right FPV Direction