No capítulo anterior, conectamos o drone ao Betaflight pela primeira vez.
Esse foi um marco importante.
Confirmamos que:
- o controlador de voo conecta ao computador
- o Betaflight detecta a placa
- a aba Setup abre corretamente
- o giroscópio reage quando o drone se move
- a conexão básica de software está funcionando
Agora estamos prontos para começar o processo real de configuração.
O primeiro grande passo é entender e configurar:
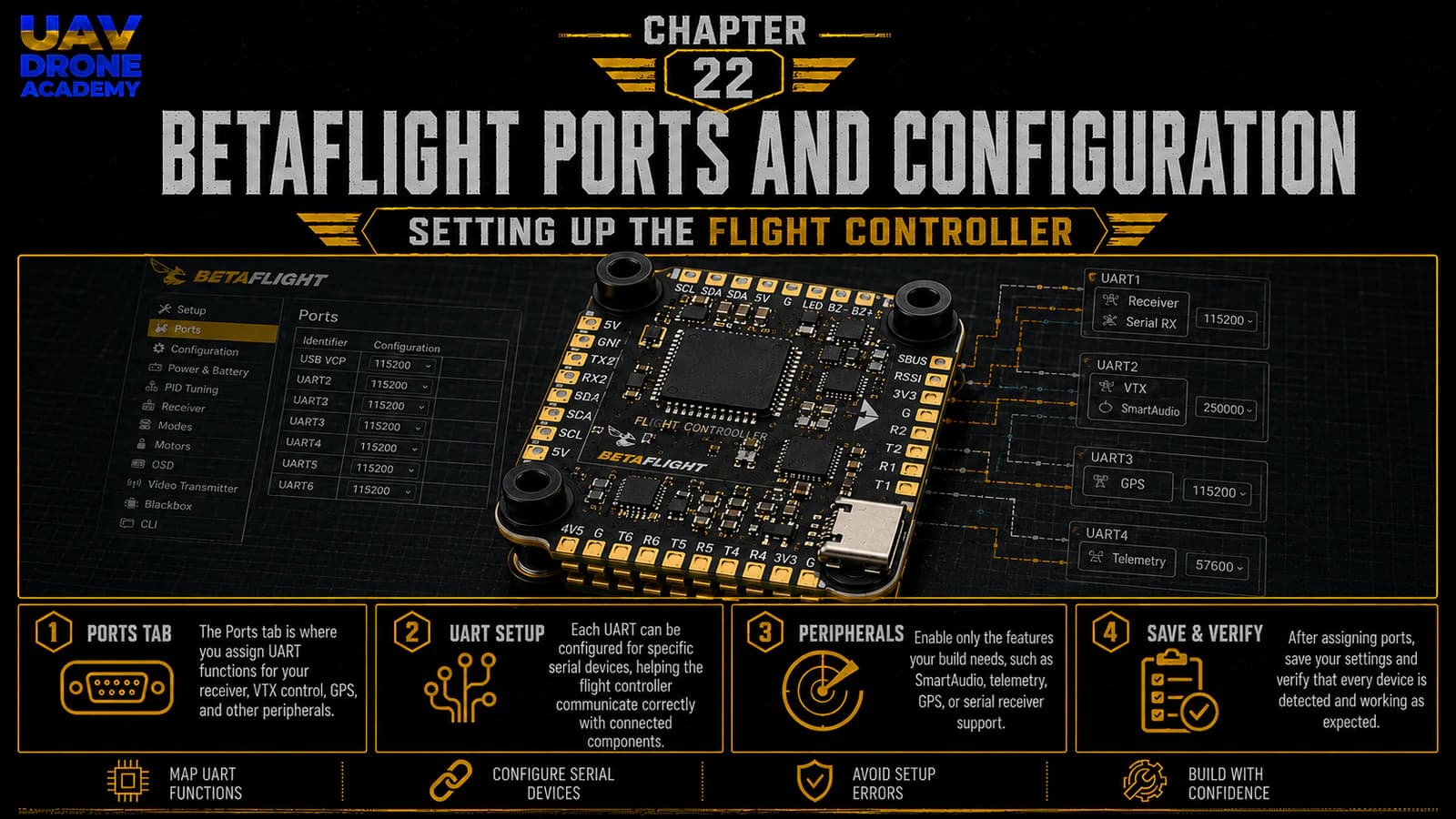
Betaflight Ports
A aba Ports informa ao controlador de voo quais dispositivos estão conectados a quais portas de comunicação.
Isso é extremamente importante porque o controlador de voo precisa se comunicar com vários componentes, incluindo:
- o receptor ExpressLRS
- o fio de controle do VTX
- possíveis sistemas de telemetria
- possíveis módulos GPS no futuro
- outros dispositivos seriais
Para iniciantes, a aba Ports pode parecer confusa no início.
Você pode ver termos como:
- UART1
- UART2
- MSP
- Serial RX
- Telemetry Output
- Sensor Input
- Peripherals
- SmartAudio
- IRC Tramp
Não se preocupe.
Neste capítulo, vamos dividir tudo com calma e focar apenas no que nossa montagem FPV iniciante de 5 polegadas realmente precisa.
Nosso objetivo é simples:
configurar corretamente as portas de comunicação do controlador de voo para que o receptor e o controle do VTX possam funcionar depois.
O que é uma UART?
Antes de usar a aba Ports, precisamos entender um conceito importante:
UART
Uma UART é uma porta de comunicação no controlador de voo.
Ela permite que o controlador de voo troque dados com outros dispositivos.
Dispositivos comuns que usam UARTs incluem:
- receptores de rádio
- módulos GPS
- sistemas de controle VTX
- sistemas FPV digitais
- dispositivos de telemetria
Você pode pensar em cada UART como um canal de comunicação.
Se um dispositivo está conectado fisicamente à UART2, o Betaflight também precisa ser configurado para usar a UART2 para esse dispositivo.
A fiação física e a configuração de software precisam combinar.
Entendendo pads RX e TX
UARTs normalmente têm dois pads importantes:
TX
TX significa transmit.
Ele envia dados para fora do controlador de voo.
RX
RX significa receive.
Ele recebe dados para dentro do controlador de voo.
Para comunicação UART, os dispositivos normalmente são conectados de forma cruzada:
TX vai para RX
RX vai para TX
Por exemplo, se seu receptor ExpressLRS está conectado à UART2:
- TX do receptor → RX2 do controlador de voo
- RX do receptor → TX2 do controlador de voo
Então, no Betaflight, a UART2 deve ser configurada para o receptor.
Por que a configuração de Ports importa
Se a aba Ports estiver configurada incorretamente, os componentes podem estar conectados corretamente, mas ainda assim não funcionar.
Por exemplo:
Se o receptor está fisicamente conectado à UART2, mas o Serial RX está habilitado na UART1, o Betaflight não vai ler o receptor corretamente.
A fiação pode estar boa.
O receptor pode estar energizado.
O rádio pode estar bindado.
Mas o Betaflight ainda não verá o movimento dos sticks porque a porta errada está habilitada.
É por isso que este capítulo importa.
Antes de alterar Ports
Antes de alterar qualquer coisa, confirme:
- hélices removidas
- drone conectado ao Betaflight via USB
- bateria LiPo desconectada, a menos que seja necessária
- você sabe em qual UART o receptor está conectado
- você sabe em qual pad o fio de controle do VTX está conectado
- você tem o diagrama de fiação do controlador de voo disponível
Não adivinhe.
Sempre use o diagrama de fiação da sua placa exata.
A aba Ports
Abra o Betaflight e vá para:
Ports
Esta aba mostra as portas de comunicação disponíveis no controlador de voo.
Dependendo da sua placa, você pode ver:
- USB VCP
- UART1
- UART2
- UART3
- UART4
- UART5
- UART6
- ou mais
Nem todo controlador de voo tem o mesmo número de UARTs.
Isso é normal.
Entendendo USB VCP
USB VCP é a conexão USB entre o controlador de voo e seu computador.
É isso que permite ao Betaflight se comunicar com a placa via USB.
Na maioria das configurações normais, você deve deixar USB VCP como está.
Não desabilite MSP em USB VCP.
Se você desabilitar a configuração errada de comunicação USB, poderá dificultar a reconexão com a placa.
Para iniciantes:
não altere as configurações de USB VCP
Entendendo MSP
MSP significa:
MultiWii Serial Protocol
Em termos simples para iniciantes, MSP é usado para comunicação entre o Betaflight e dispositivos externos ou ferramentas de configuração.
Na aba Ports, MSP normalmente fica habilitado para USB VCP.
Alguns sistemas avançados também usam MSP em UARTs, mas nossa montagem analógica iniciante não precisa de configuração avançada de MSP agora.
Importante:
não habilite MSP aleatoriamente em UARTs
Habilitar MSP na UART errada pode criar conflitos.
Aviso importante sobre MSP e Serial RX
A documentação do Betaflight alerta que MSP e Serial RX não devem ser habilitados na mesma UART porque isso cria conflito. O Betaflight pode se recusar a salvar configurações incompatíveis de portas para evitar comportamento indesejado.
Para iniciantes, a regra é simples:
cada UART deve ter uma função clara
Se a UART2 é usada para o receptor, não use essa mesma UART para MSP.
Mantenha a configuração limpa.
Configurando a porta do receptor
Nossa montagem usa:
ExpressLRS
A maioria dos receptores ExpressLRS se comunica com o Betaflight usando:
CRSF
Este é um protocolo de receptor serial.
Isso significa que precisamos habilitar:
Serial RX
na UART onde o receptor está fisicamente conectado.
Como saber qual UART usar
Observe sua fiação.
Se o receptor está soldado em:
- RX1/TX1, ele está na UART1
- RX2/TX2, ele está na UART2
- RX3/TX3, ele está na UART3
- RX4/TX4, ele está na UART4
O guia de configuração do Betaflight explica a mesma lógica: RX2/TX2 correspondem à UART2, RX1/TX1 correspondem à UART1, e Serial RX deve ser habilitado na UART onde o receptor está conectado.
Exemplo:
Se os fios do receptor estão conectados assim:
- TX do receptor → RX2
- RX do receptor → TX2
então seu receptor está conectado à:
UART2
Na aba Ports, habilite:
Serial RX na UART2
Depois salve e reinicie.
O que não fazer
Não habilite Serial RX em várias UARTs.
Não habilite Serial RX em uma UART que não tem nada conectado.
Não habilite Serial RX na mesma UART usada por outro dispositivo.
Para nossa montagem iniciante, apenas uma UART deve ser atribuída ao receptor.
Configurando o controle do VTX
Nosso VTX analógico pode ter um fio de controle.
Esse fio de controle permite que o Betaflight controle configurações do VTX como:
- band
- canal
- nível de potência
- pit mode
Protocolos comuns de controle VTX analógico incluem:
- SmartAudio
- IRC Tramp
A documentação do Betaflight explica que SmartAudio ou IRC Tramp deve ser selecionado na UART correta na aba Ports, normalmente pelo menu Peripherals.
Como o controle do VTX é conectado
Normalmente, o controle de VTX analógico usa um fio conectado a um pad TX do controlador de voo.
Por exemplo:
- fio SmartAudio do VTX → TX3
Se o fio de controle do VTX está conectado ao TX3, então no Betaflight você configura a UART3 para controle do VTX.
Você faz isso na aba Ports, em:
Peripherals
Depois seleciona:
- TBS SmartAudio
- IRC Tramp
dependendo do seu VTX.
Exemplo de configuração de controle VTX
Se o fio SmartAudio do seu VTX está conectado ao TX3:
- vá para a aba Ports
- encontre UART3
- vá até Peripherals
- selecione TBS SmartAudio
- salve e reinicie
Se seu VTX usa IRC Tramp:
- vá para a aba Ports
- encontre a UART correta
- vá até Peripherals
- selecione IRC Tramp
- salve e reinicie
Não selecione os dois.
Use o protocolo suportado pelo seu VTX específico.
E se você não conectar o controle do VTX?
O VTX ainda pode transmitir vídeo sem SmartAudio ou Tramp, dependendo do modelo.
Mas sem controle VTX, talvez você precise alterar configurações manualmente usando:
- botões no VTX
- LEDs
- procedimentos específicos do fabricante
Para iniciantes, controle VTX pelo Betaflight é muito mais fácil.
É por isso que recomendamos conectar e configurar isso quando possível.
E quanto ao GPS?
Nossa montagem iniciante ainda não inclui GPS.
Então não configure GPS na aba Ports agora.
GPS pode ser adicionado depois como upgrade.
Por enquanto, manter a montagem simples faz parte da estratégia.
Não habilite GPS em UARTs aleatórias.
Recursos não usados devem permanecer desabilitados.
E quanto a Telemetry Output?
ExpressLRS pode fornecer telemetria pelo link do receptor.
No entanto, iniciantes não precisam complicar demais as configurações de telemetria nesta etapa.
Para uma configuração ELRS básica, o mais importante é:
- receptor conectado corretamente
- Serial RX habilitado na UART correta
- protocolo do receptor configurado corretamente depois
- link de rádio funcionando
Detalhes de telemetria podem ser refinados depois, se necessário.
Save and Reboot
Depois de alterar as portas, clique em:
Save and Reboot
O Betaflight reiniciará o controlador de voo.
Depois de reconectar, volte à aba Ports e confirme que suas configurações foram salvas.
Isso é importante.
Se as configurações não salvarem, pode haver um conflito.
Por exemplo:
- MSP e Serial RX habilitados na mesma UART
- funções incompatíveis selecionadas em uma porta
- combinação errada de configuração
Se as configurações forem resetadas depois de salvar, procure conflitos.
Configuração básica de Ports para nossa montagem iniciante
Uma configuração típica para iniciantes pode ficar assim:
USB VCP
MSP habilitado.
Usado para conexão com o Betaflight.
UART para receptor ExpressLRS
Serial RX habilitado.
Exemplo:
- UART2 → Serial RX habilitado
UART para controle do VTX
Peripheral selecionado.
Exemplo:
- UART3 → TBS SmartAudio
Outras UARTs
Deixe desabilitadas, a menos que sejam necessárias.
Isso mantém a configuração simples e limpa.
Observação importante sobre os números exatos das UARTs
Os números exatos das UARTs dependem do seu controlador de voo e da sua fiação.
Não copie cegamente os números de UART de outra montagem.
Sempre faça as configurações no Betaflight de acordo com a sua fiação real.
A pergunta correta não é:
“Qual UART todo mundo deve usar?”
A pergunta correta é:
“Em qual UART eu conectei este componente?”
Essa é a UART que você configura.
A aba Configuration
Depois da aba Ports, a próxima área importante é a aba Configuration.
Neste capítulo, vamos apenas introduzir os conceitos básicos.
A configuração completa do receptor, modos, motores, OSD e PID será tratada em capítulos posteriores.
Abra:
Configuration
Aqui você verá as principais configurações do controlador de voo.
Para iniciantes, não altere tudo.
Precisamos apenas entender as seções mais importantes.
Mixer
Para um drone FPV normal de 5 polegadas, o mixer deve ser:
Quad X
Essa é a configuração padrão para um quadcopter de quatro motores.
A maioria dos controladores de voo modernos já vem com Quad X como padrão.
Não altere isso, a menos que saiba exatamente por quê.
Protocolo ESC / Motor
O Betaflight usa um protocolo de motor para se comunicar com o ESC.
Montagens FPV modernas normalmente usam:
DShot
DShot é um protocolo digital de ESC.
Para muitas montagens modernas de 5 polegadas, opções comuns incluem:
- DShot300
- DShot600
Para iniciantes, a configuração padrão de um stack moderno frequentemente já é adequada.
Não altere o protocolo dos motores aleatoriamente.
A configuração do protocolo dos motores se tornará mais relevante quando verificarmos o comportamento dos motores depois.
Receiver Mode
Para nosso receptor ExpressLRS, o modo do receptor deve ser:
Serial-based receiver
A documentação da aba Receiver do Betaflight explica que a maioria dos receptores modernos se comunica por protocolos seriais como CRSF ou SBUS.
Como o ExpressLRS normalmente usa CRSF, essa é a direção correta para nossa montagem.
A configuração detalhada do receptor será tratada no próximo capítulo.
Serial Receiver Provider
Para ExpressLRS, o serial receiver provider normalmente é:
CRSF
Isso informa ao Betaflight como interpretar o sinal do receptor.
Não selecione SBUS, Spektrum ou outros protocolos para ELRS, a menos que esteja fazendo algo muito específico e saiba o motivo.
Para nossa montagem:
ELRS usa CRSF
Board and Sensor Alignment
Se o controlador de voo foi montado com a seta apontando para frente, o alinhamento da placa talvez não precise de ajustes.
Se a placa foi rotacionada durante a instalação, o Betaflight precisa ser informado sobre essa rotação.
Para iniciantes, esse é um dos motivos pelos quais recomendamos montar a seta do controlador de voo apontando para frente sempre que possível.
Neste capítulo, não ajuste board alignment, a menos que o modelo 3D claramente se mova incorretamente e você entenda a orientação da montagem.
Podemos verificar isso com cuidado depois.
Accelerometer
Em drones FPV, o accelerometer é usado principalmente em modos autonivelados como:
- Angle Mode
- Horizon Mode
Muitos pilotos freestyle eventualmente voam em Acro Mode, onde o accelerometer não é usado para autonivelamento.
No entanto, para iniciantes, Angle Mode pode ser útil durante os primeiros testes.
Então deixar o accelerometer habilitado nesta etapa é razoável.
Arming Settings
O Betaflight inclui configurações de segurança que impedem o arming sob certas condições.
Não desabilite recursos de segurança aleatoriamente.
Se o drone se recusar a armar depois, o Betaflight normalmente mostra uma arming disable flag explicando o motivo.
Vamos tratar a configuração de arming depois, quando configurarmos modos e controles do receptor.
Motor Stop
Motor Stop é uma configuração que pode impedir os motores de girarem em idle quando o drone está armado.
Em montagens FPV modernas, muitos pilotos mantêm os motores girando em idle quando armado porque isso mostra claramente que o drone está armado.
Iniciantes não devem alterar isso aleatoriamente.
Vamos tratar o comportamento de arming depois, no contexto correto de segurança.
DShot Beacon
DShot Beacon pode fazer os motores apitarem usando comandos do ESC.
Isso pode ajudar a localizar um drone caído, embora não substitua um buzzer adequado.
Não precisamos configurar isso profundamente agora.
Podemos revisitar isso depois.
Não altere PID ou filtros ainda
Iniciantes muitas vezes ficam curiosos sobre PID e filtros cedo demais.
Não altere configurações de PID ou filtros nesta etapa.
Os padrões modernos do Betaflight normalmente são bons o suficiente para um primeiro hover e configuração básica.
PID e filtros serão introduzidos depois como conceitos básicos, não como tuning agressivo.
Por enquanto:
deixe PID e filtros como estão
Abordagem recomendada para iniciantes
Para este capítulo, a abordagem recomendada é:
- Abra a aba Ports.
- Identifique a UART do receptor.
- Habilite Serial RX na UART do receptor.
- Identifique a UART de controle do VTX.
- Selecione SmartAudio ou IRC Tramp na UART correta.
- Salve e reinicie.
- Abra a aba Configuration.
- Confirme o mixer Quad X.
- Confirme o modo Serial-based receiver.
- Confirme CRSF como receiver provider para ELRS.
- Evite alterar configurações avançadas.
Isso mantém a configuração limpa e controlada.
O que ainda não estamos fazendo
Neste capítulo, ainda não estamos:
- bindando ExpressLRS
- testando movimento dos sticks
- atribuindo switch de Arm
- testando motores
- alterando direção dos motores
- configurando layout do OSD
- configurando comportamento de failsafe
- ajustando PID
- instalando hélices
Essas etapas vêm depois.
Este capítulo apenas prepara a estrutura de comunicação.
Erros comuns de iniciantes
Habilitar Serial RX na UART errada
Se o receptor está conectado à UART2, habilite Serial RX na UART2.
Não adivinhe.
Habilitar Serial RX em várias UARTs
Apenas a UART do receptor deve ter Serial RX habilitado.
Habilitar MSP e Serial RX na mesma UART
Isso cria conflito.
Mantenha cada UART atribuída a uma finalidade clara.
Selecionar o protocolo VTX errado
Use SmartAudio apenas se seu VTX suporta SmartAudio.
Use IRC Tramp apenas se seu VTX suporta IRC Tramp.
Copiar cegamente a configuração de UART de outra pessoa
Sua configuração de UART precisa combinar com sua fiação real.
A montagem de outro piloto pode usar pads diferentes.
Alterar configurações avançadas cedo demais
Não altere PID, filtros, protocolo dos motores ou recursos avançados sem motivo.
Checklist de configuração para iniciantes
Antes de seguir para o próximo capítulo, confirme:
- Betaflight conecta corretamente
- aba Ports abre normalmente
- USB VCP MSP deixado como estava
- Serial RX habilitado apenas na UART do receptor
- controle VTX selecionado apenas na UART correta, se conectado
- UARTs não usadas deixadas desabilitadas
- configurações salvas com sucesso
- aba Configuration mostra Quad X
- modo do receptor configurado para serial receiver
- CRSF selecionado para ExpressLRS
- nenhuma configuração avançada alterada aleatoriamente
- hélices ainda removidas
Se tudo isso estiver correto, o controlador de voo está pronto para bind do receptor e configuração do rádio.
O que concluímos
Neste ponto, nós:
- entendemos o que são UARTs
- entendemos a lógica de TX e RX
- configuramos a porta do receptor
- configuramos o controle VTX, se disponível
- evitamos conflitos de MSP
- revisamos configurações básicas da aba Configuration
- confirmamos a direção correta para configuração do ExpressLRS
- preparamos o drone para bind do rádio
Este é um passo importante.
Agora o drone está começando a entender quais dispositivos conectados pertencem a quais portas de comunicação.
Nossa filosofia daqui em diante
A fase de configuração deve ser abordada da mesma forma que a montagem física:
um sistema por vez
Não configuramos tudo aleatoriamente.
Identificamos o sistema.
Confirmamos a fiação.
Configuramos a opção correspondente no software.
Salvamos.
Verificamos.
Esse método evita confusão e torna o troubleshooting muito mais fácil.
Conclusão
A aba Ports é uma das áreas mais importantes do Betaflight.
Ela informa ao controlador de voo como se comunicar com dispositivos externos, como receptor e VTX.
Para nossa montagem FPV iniciante de 5 polegadas, as configurações de porta mais importantes são:
- habilitar Serial RX na UART conectada ao receptor ExpressLRS
- selecionar o protocolo correto de controle VTX na UART conectada ao fio de controle do VTX
- evitar conflitos de MSP
- deixar portas não usadas desabilitadas
A aba Configuration também confirma a direção básica do sistema:
- mixer Quad X
- modo de receptor serial
- CRSF para ExpressLRS
- nenhuma alteração avançada desnecessária
Agora que a estrutura de comunicação do controlador de voo está preparada, estamos prontos para conectar o rádio controle do piloto ao drone.
No próximo capítulo, vamos bindar o receptor ExpressLRS ao rádio controle.
Próximo capítulo
Como bindar o receptor ExpressLRS ao seu rádio controle