Neste ponto, nosso drone FPV iniciante de 5 polegadas está quase totalmente configurado.
Nós já:
- conectamos o drone ao Betaflight
- configuramos a aba Ports
- bindamos o receptor ExpressLRS
- verificamos os canais do receptor
- atribuimos o switch de Arm
- revisamos o comportamento de failsafe
- verificamos a ordem dos motores
- verificamos a direção dos motores
- configuramos um OSD limpo e amigável para iniciantes
Antes de avançar para a fase de preparação do primeiro voo, precisamos entender mais um tópico importante:
PID e filtros
Para muitos iniciantes, PID e filtros parecem ser a parte mais complicada do Betaflight.
Você pode ver termos como:
- P gain
- I gain
- D gain
- Feedforward
- D-term
- filtragem do giroscópio
- dynamic notch
- RPM filtering
- sliders
- perfis
- rates
- logs de Blackbox
No começo, isso pode parecer assustador.
Mas aqui está o ponto mais importante para entender:
iniciantes não precisam se tornar especialistas em tuning antes do primeiro voo.
As configurações padrão modernas do Betaflight já são muito capazes para muitas montagens FPV normais de 5 polegadas.
O objetivo deste capítulo não é ensinar tuning avançado.
O objetivo é explicar os conceitos básicos para que você entenda o que PID e filtros fazem, por que eles importam e por que devemos evitar mudanças desnecessárias cedo demais.
O que são configurações PID?
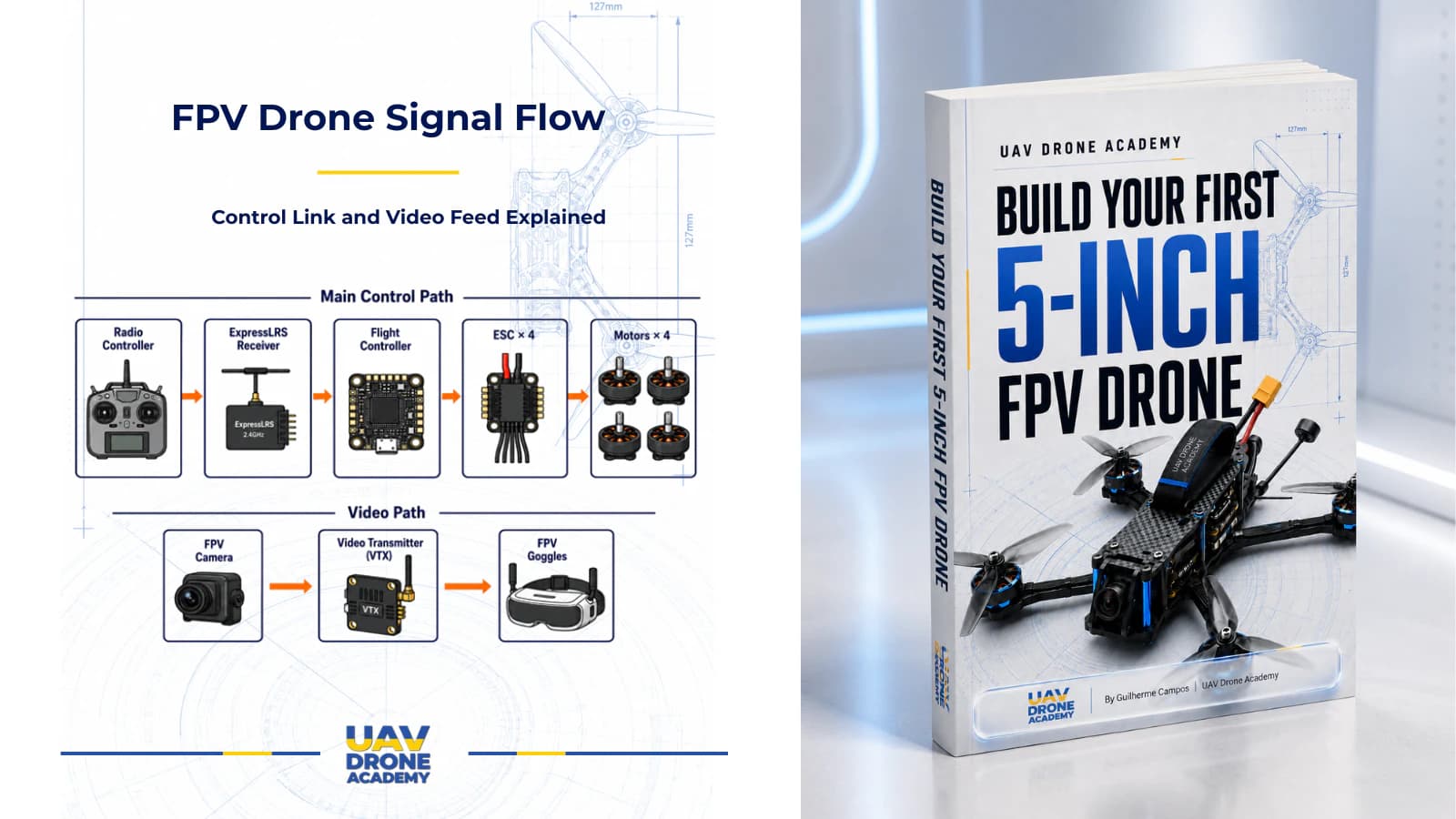
PID faz parte do sistema de controle que ajuda o drone a responder corretamente aos comandos do piloto e a se estabilizar durante o voo.
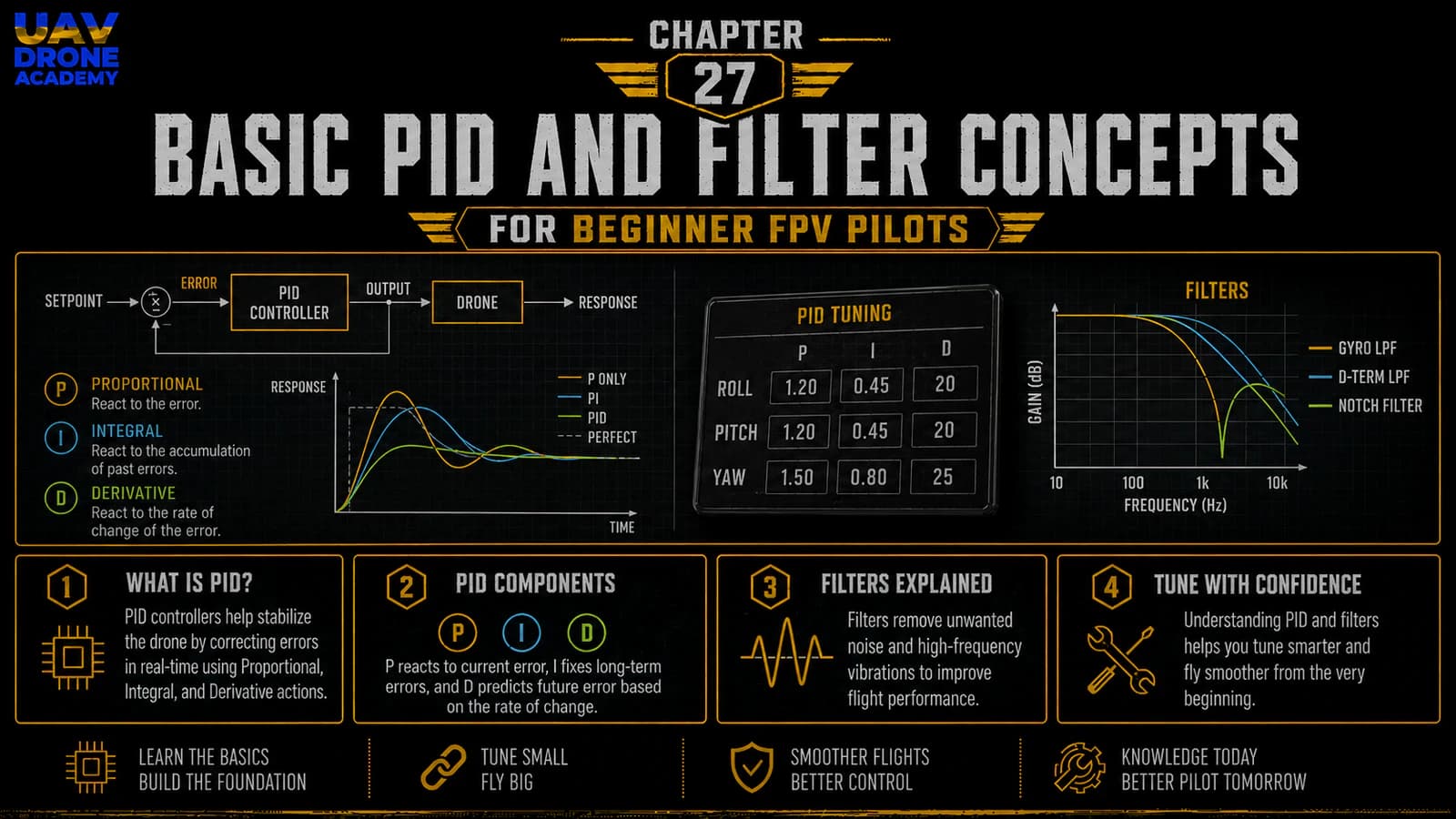
PID significa:
Proportional
Integral
Derivative
Esses três termos trabalham juntos dentro do controlador de voo.
A função deles é ajudar o drone a alcançar o movimento desejado e corrigir erros entre o que o piloto comanda e o que o drone está realmente fazendo.
Em termos simples:
PID ajuda o drone a seguir comandos com precisão.
A aba PID Tuning do Betaflight é onde as configurações do controlador PID, filtros e rates podem ser ajustadas.
Por que PID importa
Quando você move os sticks, está pedindo ao drone para girar ou se mover de uma certa forma.
Mas o drone é afetado por:
- peso
- fluxo de ar das hélices
- resposta dos motores
- vento
- vibração
- inércia
- tensão da bateria
- rigidez do frame
- comando do piloto
O controlador de voo usa a lógica PID para corrigir constantemente a diferença entre o movimento desejado e o movimento real.
Isso acontece muitas vezes por segundo.
Sem controle PID, o drone não pareceria estável nem preciso.
Uma forma simples de entender PID
Imagine que você quer que o drone gire a uma certa velocidade.
O controlador de voo compara duas coisas:
- O que você pediu com os sticks.
- O que o giroscópio diz que o drone está realmente fazendo.
Se houver uma diferença, o Betaflight corrige ajustando a saída dos motores.
Essa correção é moldada pelas configurações PID.
Termo P — Proportional
O termo P reage ao erro atual.
Em linguagem simples:
P corrige o erro do momento.
Se o drone não está girando como foi comandado, P o empurra em direção ao alvo.
P mais alto pode fazer o drone parecer:
- mais preciso
- mais responsivo
- mais travado
Mas P alto demais pode causar:
- oscilações
- vibração
- comportamento de voo áspero
- motores quentes
Para iniciantes, o conceito importante é:
P dá ao drone autoridade para corrigir o movimento.
Termo I — Integral
O termo I corrige erro de longo prazo.
Em linguagem simples:
I ajuda o drone a manter a atitude ao longo do tempo.
Ele ajuda quando o drone é afetado por:
- vento
- posição da bateria
- desequilíbrio de peso
- manobras longas
- forças externas constantes
Se I estiver baixo demais, o drone pode:
- derivar
- não manter o ângulo durante movimentos longos
- parecer solto
Se I estiver alto demais, ele pode:
- parecer lento para recuperar
- criar comportamento indesejado depois de comandos nos sticks
- parecer menos natural
Para iniciantes, o conceito importante é:
I ajuda o drone a permanecer consistente.
Termo D — Derivative
O termo D reage à velocidade com que o erro está mudando.
Em linguagem simples:
D amortece movimentos rápidos.
D ajuda a reduzir:
- bounce-back
- overshoot
- prop wash
- oscilações rápidas
- recuperação áspera depois de movimentos rápidos
Mas D também é sensível a ruído.
D demais pode causar:
- motores quentes
- saída de motor ruidosa
- menor eficiência
- possível estresse nos componentes
Para iniciantes, o conceito importante é:
D suaviza e amortece o movimento, mas em excesso pode aquecer os motores.
Feedforward
Feedforward é outro conceito importante de controle no Betaflight.
Ele ajuda o drone a responder rapidamente aos movimentos dos sticks.
Enquanto PID reage ao erro, Feedforward antecipa o comando do piloto e ajuda o drone a parecer mais conectado aos sticks.
Em linguagem simples:
Feedforward melhora a resposta aos sticks.
Se Feedforward estiver baixo demais, o drone pode parecer atrasado ou macio.
Se Feedforward estiver alto demais, o drone pode parecer agressivo ou nervoso.
Para iniciantes, normalmente é melhor deixar as configurações de Feedforward em padrões seguros até ter experiência de voo suficiente para entender o que deseja mudar.
PID não é a mesma coisa que rates
Iniciantes frequentemente confundem configurações PID com rates.
Eles são diferentes.
Configurações PID afetam como o drone corrige movimento e se estabiliza.
Rates afetam a velocidade com que o drone gira quando você move os sticks.
Rates mudam a sensação dos controles.
PID muda o comportamento de controle nos bastidores.
Para um iniciante, rates podem ser ajustados depois para tornar o drone mais fácil de controlar.
Mas tuning de PID não deve ser alterado aleatoriamente.
O que são filtros?
Filtros ajudam a limpar dados ruidosos dos sensores.
O controlador de voo usa dados do giroscópio para entender como o drone está se movendo.
Mas drones reais produzem vibração a partir de:
- motores
- hélices
- ressonância do frame
- parafusos soltos
- rolamentos danificados
- hélices desbalanceadas
- ruído elétrico
Se o controlador de voo reagir diretamente a todo esse ruído, a saída dos motores pode ficar áspera e instável.
Filtros reduzem ruído indesejado antes que ele cause problemas.
Em linguagem simples:
filtros ajudam o Betaflight a ignorar vibração e focar no movimento real.
Por que filtragem importa
Um sinal limpo ajuda o drone a voar melhor.
Boa filtragem pode melhorar:
- suavidade
- comportamento dos motores
- estabilidade do giroscópio
- sensação de voo
- confiabilidade
Filtragem ruim pode levar a:
- motores quentes
- oscilações
- voo áspero
- saída de motor ruidosa
- comportamento instável
Filtros são especialmente importantes porque o termo D pode amplificar ruído.
É por isso que PID e filtros estão intimamente relacionados.
Filtragem do giroscópio
O giroscópio mede rotação.
A filtragem do giroscópio reduz vibração indesejada antes que o Betaflight use esses dados para controle.
Se o sinal do giroscópio estiver ruidoso, o controlador de voo pode pensar que o drone está se movendo mais do que realmente está.
Isso pode causar comandos de correção desnecessários para os motores.
Boa filtragem do giroscópio ajuda o controlador de voo a tomar decisões melhores.
Filtragem do D-term
O termo D é útil, mas sensível a ruído.
A filtragem do D-term ajuda a reduzir ruído antes que ele cause motores quentes ou saída de motor áspera.
Se a filtragem do D-term estiver baixa demais, ruído pode chegar aos motores.
Se a filtragem estiver alta demais, o drone pode parecer menos responsivo.
As configurações padrão modernas do Betaflight normalmente equilibram bem isso para muitas montagens iniciantes.
Dynamic Notch Filtering
Dynamic notch filtering ajuda a detectar e reduzir frequências específicas de vibração que mudam durante o voo.
Conforme a velocidade dos motores muda, as frequências de vibração também mudam.
Dynamic notch filtering ajuda a mirar esse ruído de forma mais inteligente.
Iniciantes não precisam ajustar profundamente filtros dynamic notch antes do primeiro voo.
O conceito importante é:
filtros dinâmicos ajudam o Betaflight a lidar com ruído de vibração que muda.
RPM Filtering
RPM filtering usa informações de velocidade dos motores vindas do ESC para filtrar ruído relacionado aos motores com mais precisão.
Isso pode melhorar o desempenho de voo quando configurado corretamente.
No entanto, RPM filtering depende de telemetria do ESC ou suporte a bidirectional DShot.
Para iniciantes, isso pode ser útil depois, mas não deve se tornar a primeira prioridade antes do voo seguro básico.
Se sua montagem e configuração do Betaflight já suportam RPM filtering corretamente, ótimo.
Se não, não entre em pânico.
A primeira prioridade ainda é:
- configuração segura
- direção correta dos motores
- receptor funcionando
- OSD limpo
- teste de hover seguro
Por que iniciantes não devem fazer tuning cedo demais
Muitos iniciantes veem os sliders de PID e imediatamente querem ajustá-los.
Isso normalmente é um erro.
Antes de mudar PID ou filtros, você precisa saber se o drone realmente tem um problema.
Um problema de voo ruim pode ser causado por:
- instalação errada das hélices
- hélices danificadas
- parafusos do frame soltos
- rolamentos ruins nos motores
- soldas ruins
- direção errada dos motores
- orientação incorreta do controlador de voo
- bateria ruim
- vibração do frame
- montagem solta do stack
Se você alterar configurações PID antes de verificar os fundamentos, pode esconder o problema real ou piorar o drone.
Problemas mecânicos vêm primeiro
Antes de ajustar software, sempre verifique a montagem mecânica.
Uma montagem mecânica limpa importa mais do que tuning agressivo.
Verifique:
- parafusos do frame
- parafusos dos motores
- hélices
- movimento do sino do motor
- montagem do stack
- soft mounts
- fios tocando o giroscópio
- antenas soltas
- braços trincados
- hélices danificadas
Um drone mecanicamente limpo normalmente voa muito melhor com configurações padrão.
Um drone mecanicamente ruim não será corrigido corretamente por mudanças aleatórias de PID.
Configurações padrão do Betaflight normalmente são boas o suficiente
As configurações padrão modernas do Betaflight são projetadas para funcionar bem em muitas montagens FPV comuns.
Para um drone freestyle normal de 5 polegadas com componentes comuns, os padrões costumam ser bons o suficiente para:
- primeiro hover
- testes básicos de voo
- aprendizado inicial
- verificação inicial da configuração
Isso não significa que os padrões são perfeitos para todo drone.
Mas normalmente são um ponto de partida seguro.
Para iniciantes, o melhor primeiro passo é:
comece com os padrões, verifique o drone e só faça tuning se necessário.
Quando considerar tuning?
Você pode considerar tuning depois se o drone mostrar problemas claros como:
- oscilações persistentes
- motores quentes depois de voos curtos
- prop wash forte
- bounce-back depois de flips ou rolls
- tracking ruim
- vibração estranha
- som áspero nos motores
- comportamento instável que não é causado por hardware
Mas, mesmo assim, tuning deve ser feito com cuidado.
Não mude muitas coisas de uma vez.
Mude uma coisa, teste, observe e compare.
Aviso sobre motores quentes
A temperatura dos motores é um dos indicadores de segurança mais importantes em tuning.
Depois de um hover curto ou voo curto, os motores devem ser verificados com cuidado.
Motores mornos podem ser normais.
Motores muito quentes são um sinal de alerta.
Motores quentes podem indicar:
- D gain demais
- pouca filtragem
- vibração mecânica
- hélices danificadas
- rolamentos ruins
- configurações incorretas
- sistema de energia sobrecarregado
Se os motores estiverem quentes demais para tocar confortavelmente, pare e investigue.
Não continue voando.
E os sliders de PID?
O Betaflight inclui sliders que permitem ajustes mais fáceis de PID e filtros.
Esses sliders são mais amigáveis para iniciantes do que alterar cada valor manualmente.
No entanto, amigável para iniciantes não significa sem risco.
Não mova sliders aleatoriamente.
Se eventualmente usar sliders, faça isso devagar e com um motivo claro.
Para os primeiros voos, deixar os sliders padrão sem mexer normalmente é a escolha mais segura.
E os presets?
O Betaflight pode incluir presets para determinadas configurações ou componentes.
Presets podem ser úteis quando são projetados para seu hardware ou situação específica.
Mas presets ainda devem ser usados com cuidado.
Um preset feito para outro drone, outro tamanho de hélice, outra bateria ou outro estilo de voo pode não ser ideal para sua montagem.
Para iniciantes, evite carregar presets aleatórios só porque alguém online recomendou.
Entenda o propósito primeiro.
Logs de Blackbox
Blackbox logging grava dados de voo que podem ser analisados depois.
Pilotos avançados usam Blackbox para fazer tuning com mais precisão.
Blackbox pode ajudar a identificar:
- vibração
- ruído
- oscilações
- comportamento do D-term
- problemas de saída dos motores
- problemas de tuning
Mas, para iniciantes, Blackbox não é necessário antes do primeiro teste de hover.
Ele pode se tornar útil depois, conforme sua compreensão melhora.
Rates vs tuning para iniciantes
Se o drone parece rápido demais ou sensível demais, a primeira coisa que iniciantes normalmente precisam não é tuning de PID.
Eles podem precisar de rates mais suaves.
Rates controlam a velocidade com que o drone gira quando você move os sticks.
Uma configuração de rates amigável para iniciantes pode tornar o drone mais fácil de aprender.
PID tuning não deve ser usado para resolver um problema de conforto do piloto que, na verdade, é causado por rates agressivos.
O que devemos fazer para esta montagem
Para nossa montagem FPV iniciante de 5 polegadas, a melhor abordagem é:
- manter as configurações PID padrão do Betaflight
- manter as configurações padrão de filtros
- não carregar presets aleatórios
- não ajustar tuning avançado ainda
- concluir as verificações finais de segurança
- realizar um primeiro hover controlado
- observar a temperatura dos motores
- inspecionar o comportamento de voo
- fazer tuning apenas depois se houver um motivo real
Isso mantém o processo seguro e lógico.
Checklist de PID e filtros para iniciantes
Antes de avançar, confirme:
- hélices ainda removidas durante a configuração
- Betaflight conecta corretamente
- aba PID abre normalmente
- nenhuma alteração aleatória de PID foi feita
- nenhuma alteração aleatória de filtros foi feita
- nenhum preset desconhecido foi carregado
- parafusos do frame estão apertados
- parafusos dos motores estão corretos
- hélices não estão danificadas
- motores giram suavemente
- stack está corretamente montado com soft mounting
- nenhum fio toca o giroscópio
- iniciante entende que os padrões são o ponto de partida
Se tudo isso estiver correto, podemos avançar com segurança.
Erros comuns de iniciantes
Mudar PID antes de voar
Não faça tuning de um problema que você ainda não observou.
Comece com padrões seguros.
Tentar corrigir problemas mecânicos com software
Parafusos soltos, hélices ruins, motores danificados e vibração devem ser corrigidos mecanicamente primeiro.
Mover sliders demais de uma vez
Se você muda várias coisas ao mesmo tempo, não saberá o que ajudou ou piorou.
Ignorar temperatura dos motores
Motores quentes são sinal de alerta.
Sempre verifique a temperatura dos motores durante os primeiros testes.
Carregar presets aleatórios
Use presets apenas quando entender por que eles se aplicam ao seu drone.
Confundir rates com PID
Se o drone parece rápido demais, rates podem ser o problema, não PID.
Pensar demais em tuning cedo demais
Iniciantes devem focar primeiro em montagem segura, configuração correta e prática controlada.
Tuning avançado pode vir depois.
O que concluímos
Nesta etapa, nós:
- entendemos o que PID significa
- aprendemos a função básica de P, I e D
- introduzimos Feedforward
- entendemos o que filtros fazem
- revisamos filtragem do giroscópio e filtragem do D-term
- introduzimos dynamic notch e RPM filtering
- entendemos por que configurações padrão normalmente são o ponto de partida correto
- aprendemos por que problemas mecânicos devem ser corrigidos antes de tuning
- revisamos erros comuns de tuning para iniciantes
Isso nos dá entendimento suficiente para avançar sem medo da aba PID.
Não precisamos dominar tuning avançado ainda.
Só precisamos respeitá-lo e evitar mudanças aleatórias.
Nossa filosofia daqui em diante
A filosofia continua a mesma:
entenda primeiro, altere depois
Um iniciante não deve alterar configurações apenas porque elas existem.
Toda mudança deve ter um motivo.
Todo ajuste deve ser testado.
Todo problema deve ser diagnosticado antes de ser corrigido.
É assim que FPV fica menos confuso e mais confiável.
Conclusão
PID e filtros são partes importantes do desempenho de um drone FPV, mas iniciantes não precisam se tornar especialistas em tuning antes do primeiro voo.
PID ajuda o drone a seguir comandos e corrigir movimento.
Filtros ajudam a remover ruído e vibração dos dados dos sensores.
Juntos, eles ajudam o drone a voar de forma suave, precisa e confiável.
Para nossa montagem FPV iniciante de 5 polegadas, a melhor abordagem é simples:
- começar com os padrões do Betaflight
- evitar tuning aleatório
- corrigir problemas mecânicos primeiro
- verificar temperatura dos motores durante os primeiros testes
- fazer tuning depois apenas se houver um motivo claro
Agora que entendemos o propósito básico de PID e filtros, estamos prontos para entrar na etapa final de preparação.
No próximo capítulo, vamos revisar o checklist pré-voo completo e preparar o drone para seu primeiro teste de hover seguro.
Próximo capítulo
Checklist pré-voo final antes do seu primeiro teste de hover FPV