Agora chegamos a um dos momentos mais empolgantes de todo o processo de montagem.
O drone está montado.
A eletrônica está instalada.
O receptor está configurado.
Os motores foram verificados.
O OSD está funcionando.
Os conceitos básicos de PID e filtros foram entendidos.
Agora estamos chegando perto do primeiro voo real.
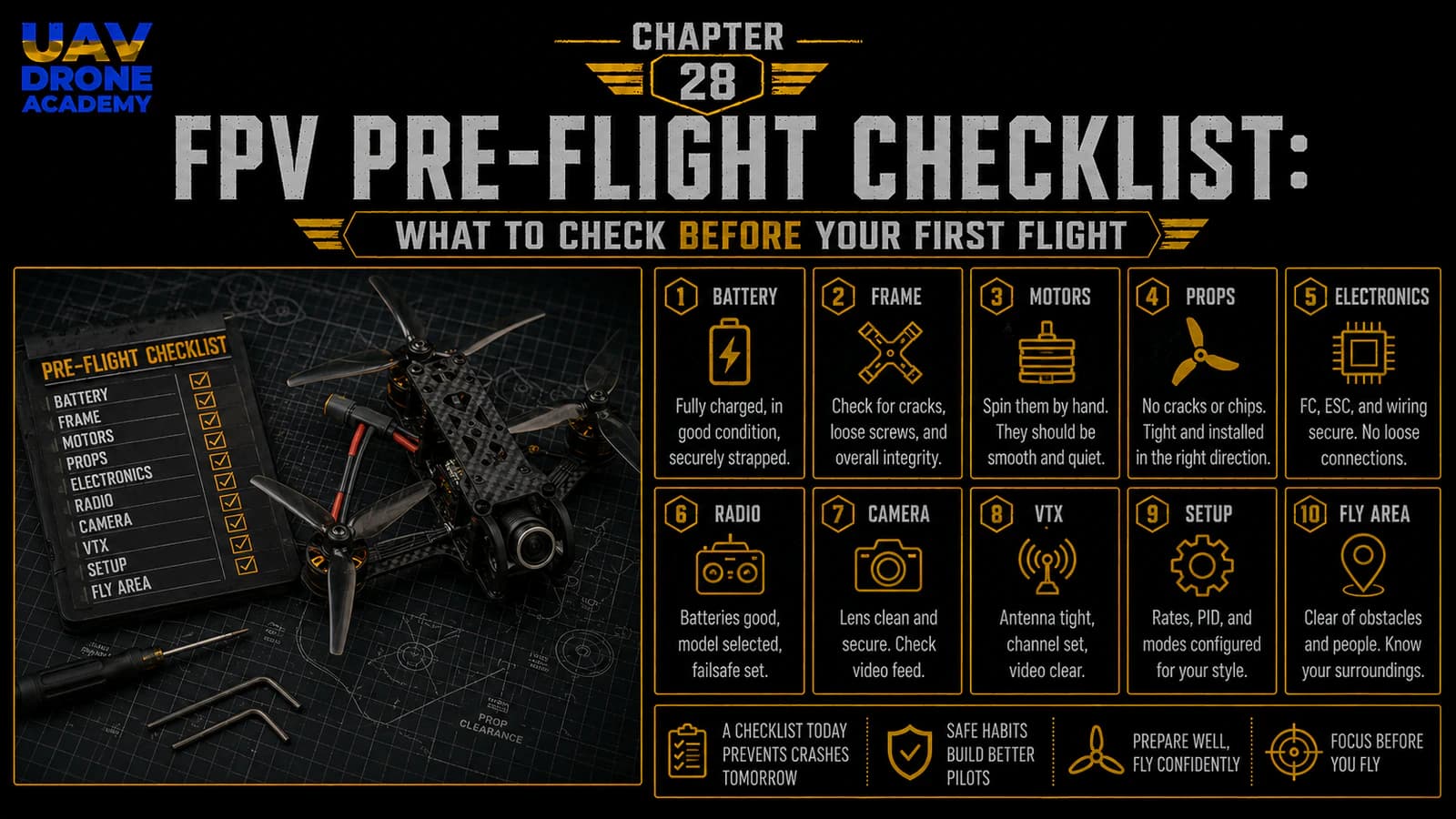
Mas antes de levar o drone para fora e tentar voar, precisamos parar e realizar um checklist pré-voo completo.
Esta etapa é extremamente importante.
Um primeiro voo nunca deve ser apressado.
Muitas quedas de iniciantes acontecem não porque o piloto não consegue voar, mas porque algo simples foi esquecido antes da decolagem:
- um parafuso solto
- direção errada da hélice
- cinta de bateria fraca
- modo de voo incorreto
- configuração ruim de failsafe
- hélice danificada
- antena do VTX ausente
- direção errada do motor
- tensão baixa da bateria
O objetivo deste capítulo é simples:
verificar se o drone está mecanicamente, eletricamente e operacionalmente pronto para seu primeiro voo controlado.
Este checklist nos ajudará a reduzir erros evitáveis e tornar o primeiro voo mais seguro, mais calmo e mais bem-sucedido.
Por que um checklist pré-voo importa
Drones FPV são máquinas potentes.
Um drone FPV de 5 polegadas pode acelerar rapidamente, girar hélices em altíssima velocidade e reagir instantaneamente aos comandos do piloto.
É por isso que a preparação importa.
Um checklist pré-voo ajuda a confirmar que:
- o drone está estruturalmente seguro
- a eletrônica está funcionando
- o link de rádio está estável
- o comportamento de failsafe está correto
- a bateria está segura
- as hélices estão instaladas corretamente
- a área de voo é apropriada
A aviação profissional usa checklists por um motivo.
Pilotos FPV também devem desenvolver esse hábito desde o início.
O objetivo do primeiro voo
Antes de verificar o drone, precisamos definir o objetivo do primeiro voo.
O primeiro voo não é para:
- manobras freestyle
- voo em alta velocidade
- teste de long range
- power loops
- filmagem cinematic
- manobras agressivas
O primeiro voo é apenas para:
validação básica
Queremos confirmar que o drone consegue:
- armar com segurança
- decolar suavemente
- pairar
- responder corretamente aos comandos
- pousar com segurança
- não apresentar grandes problemas
Isso é suficiente.
O primeiro voo deve ser curto, calmo e controlado.
Lembrete importante de segurança
Antes do teste final ao ar livre:
não instale as hélices até o momento correto
As hélices só devem ser instaladas depois de:
- verificações finais na bancada
- verificação da direção dos motores
- verificação da configuração do receptor
- confirmação do failsafe
- inspeção da área de voo
Depois que as hélices estiverem instaladas, trate o drone como perigoso.
Não manuseie de forma casual.
Não fique perto do disco das hélices.
Não arme perto de pessoas.
Parte 1 — Checklist de bancada em casa
Antes de ir para o local de voo, verifique o drone em casa, na bancada.
Nesta etapa, as hélices ainda devem estar removidas.
1. Verificação do frame
Inspecione o frame com cuidado.
Verifique:
- braços estão apertados
- placa superior está segura
- placa inferior está segura
- standoffs estão apertados
- nenhuma trinca no carbono está visível
- placas da câmera estão seguras
- caminho da cinta da bateria está livre
Um frame solto pode criar vibrações e comportamento de voo instável.
Se algo se mover, aperte antes de continuar.
2. Verificação da montagem dos motores
Verifique cada motor.
Confirme:
- todos os parafusos dos motores estão instalados
- parafusos não são longos demais
- motores estão planos sobre os braços
- sinos dos motores giram livremente
- não há rangido ou raspagem
- nenhum fio toca os sinos dos motores
Gire cada motor com a mão.
Todos devem ter sensação parecida.
Se um motor parecer áspero ou duro, inspecione antes de voar.
3. Verificação dos fios dos motores
Inspecione todos os fios dos motores.
Verifique se:
- fios estão presos ao longo dos braços
- nenhum fio consegue tocar uma hélice
- isolação não está danificada
- soldas estão limpas
- nenhum filamento solto está visível
Fios dos motores ficam expostos durante quedas, então precisam estar roteados de forma limpa.
4. Verificação do stack
Inspecione o stack do ESC e controlador de voo.
Confirme:
- parafusos do stack estão seguros
- soft mounts não estão esmagados
- ESC não está tocando fibra de carbono
- controlador de voo não está tocando soldas do ESC
- chicote ESC-to-FC está conectado
- porta USB está acessível
- nenhum fio está pressionando a área do giroscópio
Um stack limpo ajuda a reduzir vibração e problemas de configuração.
5. Verificação do cabo da bateria
Inspecione o cabo XT60 da bateria.
Verifique:
- fios positivo e negativo estão corretos
- soldas estão sólidas
- conector está seguro
- fio não está danificado
- cabo não consegue alcançar as hélices
- cabo tem alívio de tensão suficiente
O cabo da bateria carrega toda a potência do drone.
Ele precisa estar seguro.
6. Verificação do capacitor
Inspecione o capacitor.
Confirme:
- polaridade está correta
- soldas estão limpas
- capacitor está preso
- pernas estão isoladas, se necessário
- ele não consegue atingir as hélices
- ele não bloqueia a placa superior
Um capacitor solto pode quebrar durante uma queda ou por vibração.
7. Verificação da câmera
Inspecione a câmera FPV.
Confirme:
- câmera está montada com segurança
- lente está limpa
- ângulo é razoável para o primeiro voo
- fios não estão prensados
- parafusos da câmera não estão apertados demais
- imagem aparece nos óculos
Para o primeiro voo, evite um ângulo de câmera extremo.
Um ângulo moderado torna hover e voo lento mais fáceis.
8. Verificação do VTX e da antena
Inspecione o VTX e a antena.
Confirme:
- VTX está montado com segurança
- fios não estão sob tensão
- antena está conectada
- conector da antena está firme
- antena está longe do caminho das hélices
- antena não está bloqueada por fibra de carbono
- VTX não está superaquecendo durante testes de bancada
Nunca energize o VTX sem antena.
Isso pode danificar o VTX.
9. Verificação do receptor e da antena
Inspecione o receptor ExpressLRS.
Confirme:
- receptor está montado com segurança
- fios não estão sob tensão
- antena está posicionada de forma clara
- antena não está enterrada em fibra de carbono
- receptor energiza corretamente
- link de rádio funciona
Uma posição ruim da antena pode reduzir a qualidade do link.
10. Verificação da bateria
Inspecione a bateria LiPo.
Não voe com uma bateria danificada.
Verifique:
- sem inchaço
- sem perfurações
- sem fios danificados
- sem balance lead danificado
- conector XT60 está sólido
- bateria está totalmente carregada
- tensões das células estão balanceadas
Uma célula LiPo totalmente carregada deve ficar em torno de 4.2V.
Para uma bateria 6S, um pack totalmente carregado fica em torno de 25.2V.
Se a bateria parecer danificada, não use.
11. Verificação da conexão com Betaflight
Conecte o drone ao Betaflight via USB.
Confirme:
- controlador de voo conecta
- modelo 3D se move corretamente
- entradas do receptor funcionam
- switch de Arm funciona
- modes funcionam
- OSD está configurado
- nenhum aviso estranho aparece
- configurações estão salvas
Não altere configurações aleatórias nesta etapa.
Apenas verifique.
12. Verificação de Arming Disable Flags
O Betaflight usa arming disable flags para impedir condições inseguras de armamento.
Isso é um recurso de segurança, não um inimigo.
Se o drone se recusar a armar, o Betaflight normalmente explica o motivo.
Por exemplo, a documentação oficial do Betaflight lista flags como RXLOSS ou RX_FAILSAFE quando nenhum sinal válido de receptor é detectado, BADRX ou NOT_DISARMED após recuperação de failsafe do receptor enquanto o switch de arm ainda está ligado, e RUNAWAY se a proteção contra decolagem descontrolada foi acionada.
Não desabilite recursos de segurança aleatoriamente.
Corrija o problema real.
13. Verificação do failsafe
O failsafe já deve ter sido verificado na configuração anterior.
Antes do primeiro voo, confirme novamente.
Com as hélices removidas:
- Energize o drone.
- Confirme conexão do receptor.
- Confirme movimento dos sticks.
- Desligue o rádio ou simule perda de sinal com segurança.
- Confirme que o Betaflight detecta perda do receptor.
- Ligue o rádio novamente.
- Confirme que o sinal retorna.
A documentação atual de failsafe do Betaflight enfatiza que o comportamento de failsafe é importante porque a aeronave deve reagir com segurança quando o sinal do receptor é perdido ou inválido.
Para nossa montagem iniciante, a estratégia básica segura continua sendo:
perda de sinal não deve causar voo descontrolado
14. Verificação da ordem e direção dos motores
Antes de instalar hélices, verifique a ordem e a direção dos motores mais uma vez.
Use a aba Motors do Betaflight.
Confirme:
- cada slider gira o motor correto
- cada motor gira na direção correta
- direção dos motores corresponde à configuração props in ou props out selecionada
- motores giram suavemente
- nenhum motor aquece rapidamente
Faça isso com as hélices removidas.
A orientação de setup do Betaflight instrui especificamente os usuários a removerem as hélices antes de testar motores na aba Motors.
Parte 2 — Checklist do local de voo
Agora saímos da bancada e vamos para o ambiente externo de voo.
Para o primeiro voo, o local importa muito.
Não escolha um local difícil ou arriscado.
15. Escolha uma área aberta e segura
Para o primeiro voo, escolha um local que seja:
- aberto
- plano
- longe de pessoas
- longe de ruas
- longe de animais
- longe de prédios
- longe de linhas de energia
- longe de árvores
- permitido para voo
- fácil para recuperar o drone
Evite:
- estacionamentos com carros
- parques cheios
- áreas urbanas
- espaços estreitos
- telhados
- áreas internas
- florestas
- água
- grama alta
O primeiro voo deve acontecer em um ambiente tolerante a erros.
16. Verifique as regras locais
Antes de voar, certifique-se de que você tem permissão para voar naquele local.
Leis de drones variam por país, região e espaço aéreo.
Verifique regras locais sobre:
- registro de drone
- altitude máxima
- espaço aéreo restrito
- proximidade de aeroportos
- regras de privacidade
- exigência de observador para FPV
- regulamentações locais de segurança
Este curso ensina construção técnica FPV, mas todo piloto é responsável por voar legalmente e com segurança.
17. Verifique o clima
O clima importa, especialmente para iniciantes.
Evite voar com:
- vento forte
- chuva
- neve
- neblina
- baixa visibilidade
- frio extremo
- calor extremo
Para um primeiro voo, clima calmo é o melhor.
Vento leve é gerenciável, mas rajadas fortes tornam o aprendizado mais difícil.
18. Verifique a posição do sol e a visibilidade
Câmeras FPV podem ter dificuldade com luz solar direta ou mudanças rápidas de iluminação.
Antes de voar, verifique:
- direção do sol
- reflexo
- sombras
- obstáculos
- visibilidade da área de pouso
Evite apontar diretamente para o sol durante os primeiros testes, se possível.
19. Prepare uma zona de decolagem e pouso
Escolha uma área clara para decolagem.
O solo deve estar:
- plano
- seco
- livre de pedras soltas
- livre de grama alta
- livre de pessoas
- longe de obstáculos
Um pequeno landing pad é útil, mas não obrigatório.
Evite decolar de solo empoeirado ou arenoso quando possível.
Poeira pode entrar nos motores.
Parte 3 — Checklist final em campo
No local de voo, antes de instalar as hélices, repita as verificações principais.
Isso pode parecer repetitivo.
Esse é o objetivo.
Checklists evitam erros.
20. Verificação do rádio controle
Ligue o rádio controle primeiro.
Confirme:
- modelo correto selecionado
- nível de bateria está bom
- switches estão em posições seguras
- switch de Arm está desligado
- throttle está baixo
- link ExpressLRS está pronto
- antena está posicionada corretamente
Sempre ligue o rádio antes de energizar o drone.
21. Verificação dos óculos
Ligue os óculos ou monitor FPV.
Confirme:
- nível de bateria está bom
- band e canal corretos
- receptor de vídeo funciona
- antenas estão instaladas
- tela está visível
- opção de gravação está pronta, se usada
Não faça troubleshooting dos óculos depois que o drone já estiver armado.
Prepare tudo antes.
22. Verificação de energização do drone
Coloque o drone na área de decolagem.
Confirme novamente:
- hélices ainda removidas neste ponto
- antena do VTX instalada
- cinta da bateria pronta
- nenhum fio solto
- nenhum dano visível
Conecte a bateria LiPo.
Observe e escute:
- tons normais do ESC
- LEDs normais
- sem fumaça
- sem cheiro de queimado
- sem sons estranhos
Se algo parecer errado, desconecte imediatamente.
23. Verificação de vídeo e OSD
Olhe pelos óculos.
Confirme:
- imagem de vídeo está clara
- OSD aparece
- tensão da bateria aparece
- modo de voo aparece
- avisos estão visíveis
- Link Quality ou indicador RSSI aparece, se configurado
- visão da câmera não está bloqueada
Se o OSD mostrar um aviso, entenda o aviso antes de voar.
Não ignore avisos.
24. Verificação do link do receptor
Confirme que o link de rádio está ativo.
Verifique:
- receptor conectado
- nenhum aviso RXLOSS
- Link Quality parece normal
- switches se comportam corretamente
- switch de Arm ainda está desligado
Se o link de rádio estiver instável no solo, não voe.
25. Verificação curta de controle
Com as hélices ainda removidas, confirme a resposta básica dos controles, se necessário:
- indicador do switch de Arm funciona
- switch de Angle Mode funciona, se configurado
- Beeper funciona, se configurado
- OSD muda o modo de voo corretamente
Isso é apenas uma verificação final.
Não rode motores agressivamente.
Parte 4 — Checklist de instalação das hélices
Somente agora instalamos as hélices.
Este é o ponto em que a segurança se torna ainda mais importante.
Depois que as hélices estiverem instaladas:
trate o drone como ativo e perigoso
26. Confirme a direção dos motores antes de instalar as hélices
Antes de instalar as hélices, confirme novamente:
- direção dos motores escolhida
- configuração props in ou props out
- diagrama de direção dos motores no Betaflight
- direção de rotação de cada motor
Não adivinhe.
Use o diagrama da sua configuração real no Betaflight.
27. Instale a hélice correta em cada motor
Cada motor precisa da hélice correspondente à sua direção de rotação.
Verifique:
- hélice clockwise no motor clockwise
- hélice counterclockwise no motor counterclockwise
- lado impresso voltado para cima
- hélice totalmente assentada
- porca da hélice apertada com segurança
- hélice não está danificada
Não instale hélices apenas pela cor.
A direção das pás importa.
28. Aperte as porcas das hélices corretamente
As porcas das hélices devem estar apertadas o suficiente para que a hélice não escorregue.
Mas evite força excessiva que danifique o cubo da hélice ou o eixo do motor.
Depois de apertar, tente mover a hélice suavemente com a mão.
Ela não deve girar livremente no eixo do motor.
29. Verificação visual final das hélices
Olhe para o drone de cima.
Confirme:
- todas as quatro hélices estão instaladas
- direção correta
- lado impresso para cima
- sem trincas ou lascas
- nenhuma hélice tocando o frame
- nenhuma hélice tocando fios
- cabo da bateria fora das hélices
- antena fora das hélices
Este é o último momento para encontrar erros de hélice antes de armar.
Parte 5 — Checklist final antes de armar
Agora o drone está com hélices instaladas.
A partir daqui, tenha cuidado extra.
30. Fique atrás do drone
Para o primeiro teste, fique atrás do drone.
Isso ajuda a manter a orientação.
Não fique diretamente sobre ele.
Não segure o drone.
Não arme o drone na mão.
A documentação de proteção contra runaway takeoff do Betaflight alerta que problemas inseguros de hardware ou configuração podem causar um giro violento fora de controle depois de armar ou aumentar o throttle, e alerta especificamente contra segurar a aeronave na mão com hélices instaladas.
Coloque o drone no chão e dê um passo para trás.
31. Confirme que a área de decolagem está livre
Antes de armar, verifique:
- nenhuma pessoa por perto
- nenhum animal por perto
- nenhum objeto solto perto das hélices
- ninguém em frente ao drone
- nenhum obstáculo imediatamente ao redor do drone
- caminho de desarme de emergência claro
Se alguém se aproximar, não arme.
32. Confirme os switches do rádio
Antes de armar:
- throttle baixo
- switch de Arm desligado
- modo de voo correto selecionado
- Angle Mode selecionado se for usá-lo no primeiro hover
- sem aviso de failsafe
- nenhum aviso no OSD que você não entenda
O primeiro teste de hover deve ser calmo e controlado.
33. Arme brevemente e observe
Arme o drone brevemente.
Não decole imediatamente.
Escute e observe:
- motores giram normalmente
- nenhum movimento violento
- nenhuma vibração estranha
- nenhum ruído de raspagem
- nenhum aviso imediato
- drone permanece estável no chão
Se algo parecer errado:
desarme imediatamente
Não tente “forçar” um problema.
34. Não segure o drone enquanto estiver armado
Nunca segure um drone armado com hélices instaladas.
Mesmo que você ache que está sendo cuidadoso, uma resposta repentina dos motores pode causar ferimentos graves.
Se precisar inspecionar algo:
- desarme
- desconecte a bateria
- espere os motores pararem
- só então se aproxime
35. Esteja pronto para desarmar
Antes da primeira decolagem, prepare-se mentalmente para desarmar rapidamente.
Se o drone:
- virar
- girar
- vibrar violentamente
- derivar sem controle
- responder incorretamente
- comportar-se de forma inesperada
desarme imediatamente.
O switch de Arm também é sua parada de emergência.
Resumo de prontidão para o primeiro voo
Antes de seguir para o primeiro hover, confirme:
- frame seguro
- motores seguros
- parafusos dos motores corretos
- direção dos motores verificada
- ordem dos motores verificada
- receptor funcionando
- switch de Arm funcionando
- failsafe verificado
- OSD funcionando
- bateria saudável
- antena do VTX instalada
- local de voo seguro
- clima calmo
- hélices instaladas corretamente
- rádio ligado
- óculos ligados
- área de decolagem livre
- piloto pronto para desarmar
Se tudo isso for verdadeiro, o drone está pronto para seu primeiro teste de hover controlado.
Erros comuns de iniciantes
Apressar o primeiro voo
A empolgação causa erros.
Vá devagar e siga o checklist.
Voar em um local ruim
O primeiro voo deve acontecer em uma área ampla, aberta e segura.
Não perto de pessoas, carros, prédios ou árvores.
Instalar hélices antes das verificações finais
As hélices devem ser instaladas apenas perto do final do checklist.
Ignorar avisos no OSD
Se o Betaflight está avisando você, pare e entenda o motivo.
Esquecer a tensão da bateria
Não comece o primeiro voo com bateria baixa.
Decolar de forma agressiva
O primeiro voo não é uma sessão freestyle.
É um teste de hover controlado.
Não estar pronto para desarmar
Iniciantes devem estar sempre prontos para desarmar imediatamente se algo se comportar incorretamente.
Checklist pré-voo para iniciantes
Use este checklist simplificado antes do primeiro hover:
Em casa
- frame verificado
- motores verificados
- fios verificados
- stack verificado
- receptor verificado
- antena do VTX verificada
- OSD verificado
- failsafe verificado
- direção dos motores verificada
- ordem dos motores verificada
- bateria carregada
- hélices ainda removidas
No campo
- área aberta segura
- clima aceitável
- rádio ligado
- óculos ligados
- drone energizado
- vídeo funcionando
- OSD funcionando
- link do receptor funcionando
- nenhum aviso inesperado
Antes de armar
- hélices instaladas corretamente
- bateria presa
- área de decolagem livre
- throttle baixo
- modo de voo correto
- switch de Arm pronto
- piloto posicionado com segurança atrás do drone
- pronto para desarmar
O que concluímos
Nesta etapa, concluímos a inspeção pré-voo completa.
Verificamos:
- segurança mecânica
- segurança elétrica
- controle de rádio
- sistema de vídeo
- OSD
- failsafe
- sistema dos motores
- configuração das hélices
- local de voo
- prontidão final para armar
Isso nos prepara para o próximo passo:
o primeiro teste de hover
O primeiro hover não é sobre desempenho.
É sobre confirmar que o drone consegue decolar com segurança e responder corretamente.
Nossa filosofia daqui em diante
A filosofia continua a mesma:
verifique antes de voar
Todo piloto FPV bem-sucedido desenvolve bons hábitos pré-voo.
Bons hábitos evitam quedas.
Bons hábitos protegem equipamentos.
Bons hábitos protegem pessoas.
Quanto mais cuidadosamente você se preparar, mais confiante será seu primeiro voo.
Conclusão
O checklist pré-voo é um dos hábitos mais importantes que um piloto FPV iniciante pode desenvolver.
Antes do primeiro voo, você precisa confirmar que o drone está:
- mecanicamente seguro
- eletricamente seguro
- corretamente configurado
- corretamente linkado ao rádio
- mostrando dados úteis no OSD
- usando as hélices corretas
- em uma área segura para voo
Não apresse esta etapa.
O primeiro voo deve ser curto, calmo e controlado.
O objetivo não é impressionar ninguém.
O objetivo é validar a montagem com segurança.
Agora que o drone passou pelo checklist pré-voo, estamos prontos para o primeiro teste de hover controlado.
Próximo capítulo
Seu primeiro teste de hover FPV: como testar sua montagem com segurança