Até aqui, você já entende os principais componentes dentro de um drone FPV.
Mas entender as peças individualmente é apenas o começo.
O próximo passo é entender algo ainda mais importante:
Como todos esses sistemas trabalham juntos durante o voo.
O que realmente acontece quando o piloto move um stick no rádio controle?
Como esse movimento se transforma em rotação dos motores?
Como o drone se estabiliza no ar?
Como ele consegue reagir quase instantaneamente aos comandos do piloto?
Essas são as perguntas que vamos responder neste capítulo.
Não se preocupe em memorizar cada detalhe técnico.
O objetivo aqui é muito mais simples:
Construir um modelo mental claro de como um drone FPV opera em tempo real.
Depois que você entende esse processo, drones FPV deixam de parecer misteriosos e começam a fazer sentido de forma lógica.
O princípio central do voo FPV
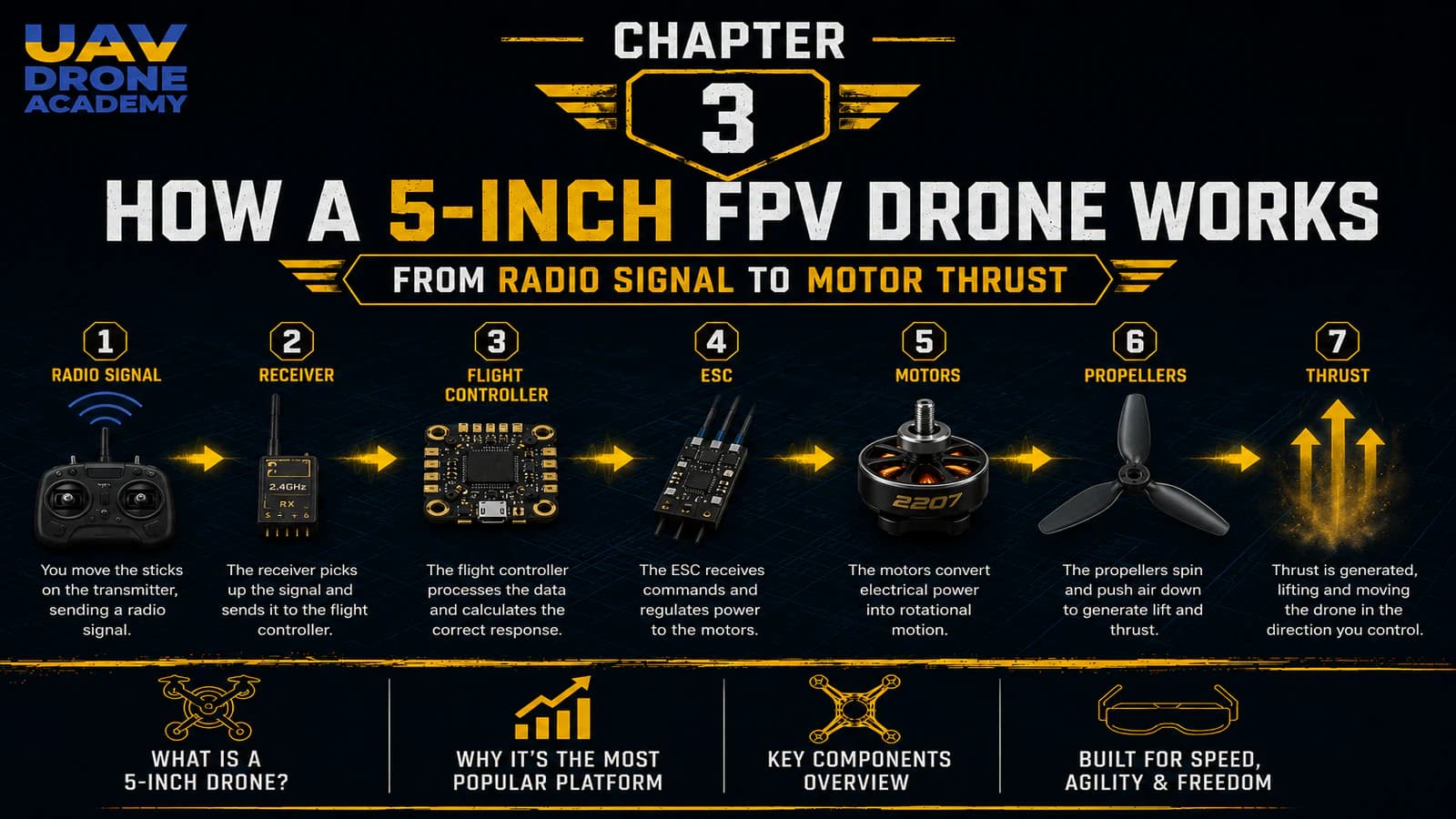
Um drone FPV voa porque executa constantemente um processo fundamental:
Receber → calcular → reagir
Isso acontece continuamente milhares de vezes por segundo.
O drone:
- recebe comandos do piloto
- mede seu próprio movimento
- calcula correções
- ajusta a velocidade dos motores
- estabiliza-se em tempo real
Esse loop nunca para enquanto o drone está armado.
Passo 1 — Comando do piloto
Tudo começa com o piloto.
O piloto controla o drone usando o rádio controle.
Os quatro eixos principais de controle são:
Throttle
Controla a potência total dos motores e a altitude.
Roll
Inclina o drone para a esquerda ou para a direita.
Pitch
Inclina o drone para frente ou para trás.
Yaw
Gira o drone para a esquerda ou para a direita.
Esses quatro controles formam a base do voo FPV.
O que acontece quando você move um stick?
Quando o piloto move um stick:
- o rádio controle converte esse movimento em sinais digitais
- esses sinais são transmitidos sem fio
- o receptor dentro do drone recebe os comandos
- o controlador de voo interpreta as informações
Todo esse processo acontece quase instantaneamente.
Sistemas FPV modernos operam com latência extremamente baixa.
Essa é uma das razões pelas quais drones FPV parecem tão responsivos.
Passo 2 — O receptor recebe o sinal
Dentro do drone, o receptor de rádio escuta constantemente os comandos vindos do piloto.
Na nossa montagem, vamos usar:
ExpressLRS, também conhecido como ELRS
porque ele oferece:
- baixa latência
- excelente alcance
- comunicação confiável
- suporte a protocolos modernos
O receptor encaminha os comandos do piloto diretamente para o controlador de voo.
Passo 3 — O controlador de voo processa tudo
O controlador de voo é o cérebro do drone.
É aqui que os cálculos mais importantes acontecem.
O controlador de voo processa constantemente:
- comandos do piloto
- dados do giroscópio
- dados do acelerômetro
- condições de voo
- cálculos de estabilização
Então ele decide em qual velocidade cada motor deve girar.
Esse processo ocorre continuamente e de forma extremamente rápida.
Controladores de voo modernos realizam milhares de cálculos por segundo.
O drone está constantemente tentando se estabilizar
Este é um dos conceitos mais importantes no FPV.
Mesmo quando o piloto não faz nada, o drone continua trabalhando ativamente.
O controlador de voo verifica constantemente:
- orientação
- movimento
- rotação
- instabilidade
Então ele ajusta automaticamente a velocidade dos motores para manter o controle.
Sem essas correções, o drone cairia imediatamente de forma descontrolada.
Entendendo o giroscópio
O giroscópio é um dos sensores mais importantes dentro do drone.
Ele mede o movimento rotacional em múltiplos eixos.
O giroscópio informa ao controlador de voo:
- quão rápido o drone está girando
- em qual direção
- como o drone está se movendo no espaço
Essa informação permite que o controlador de voo estabilize a aeronave em tempo real.
Passo 4 — O controlador de voo envia comandos para o ESC
Depois que os cálculos são concluídos, o controlador de voo envia comandos para o ESC.
Lembre-se:
ESC = Electronic Speed Controller
O ESC controla quanta energia elétrica chega a cada motor.
Isso permite que o drone:
- aumente o empuxo
- reduza o empuxo
- estabilize-se
- manobre com precisão
Passo 5 — O ESC alimenta os motores
O ESC altera rapidamente a velocidade dos motores com base nos comandos do controlador de voo.
Isso acontece de forma incrivelmente rápida.
Mudanças na velocidade dos motores ocorrem muitas vezes por segundo.
É por isso que drones FPV parecem:
- ágeis
- responsivos
- precisos
Passo 6 — Os motores giram as hélices
Os motores giram as hélices.
As hélices empurram o ar para baixo.
Isso cria empuxo.
E o empuxo é o que permite que o drone voe.
Quanto mais rápido as hélices giram:
- mais empuxo é gerado
- mais sustentação o drone produz
Como o drone se move
Agora vem uma das partes mais interessantes.
Drones FPV se movem porque o controlador de voo altera a velocidade dos motores de forma independente.
O drone não tem:
- asas
- flaps
- sistemas de direção
- superfícies aerodinâmicas móveis
Tudo é controlado puramente por ajustes na velocidade dos motores.
Pairando no ar
Para pairar:
Todos os motores giram em velocidades quase iguais.
O drone mantém sustentação equilibrada.
Movendo para frente
Para mover para frente:
- os motores traseiros giram mais rápido
- os motores dianteiros giram mais devagar
Isso inclina o drone para frente.
Depois de inclinado, o empuxo empurra o drone para frente.
Rolando para a esquerda ou para a direita
Para fazer roll:
- os motores de um lado aumentam a potência
- os motores do lado oposto reduzem a potência
Isso inclina o drone lateralmente.
Rotação em yaw
O movimento de yaw acontece equilibrando as forças rotacionais entre motores que giram no sentido horário e anti-horário.
O controlador de voo ajusta cuidadosamente o torque dos motores para girar o drone para a esquerda ou para a direita.
Por que drones FPV parecem tão diferentes
Drones de câmera tradicionais tentam:
- ficar nivelados
- se autocorrigir agressivamente
- impedir movimentos rápidos
Drones FPV são projetados de forma diferente.
Eles priorizam:
- controle direto do piloto
- resposta rápida
- agilidade
- precisão
Isso cria uma experiência de voo muito mais imersiva e dinâmica.
O drone reage quase imediatamente ao comando do piloto.
Essa sensação é uma das razões pelas quais tantas pessoas se apaixonam pelo voo FPV.
Modos de voo explicados
Drones FPV modernos oferecem diferentes modos de voo.
Esses modos alteram quanto auxílio de estabilização o drone fornece.
Angle Mode
O drone se autonivela automaticamente.
Isso é mais fácil para iniciantes.
No entanto, o movimento fica mais limitado.
Horizon Mode
Um modo híbrido entre voo estabilizado e acrobático.
Ele fornece autonivelamento parcial.
Acro Mode
Acro Mode também é conhecido como Manual Mode.
Esse é o modo FPV padrão usado por pilotos experientes.
O drone não se autonivela.
O piloto tem controle manual total.
Isso permite:
- voo freestyle
- flips
- mergulhos
- manobras avançadas
Com o tempo, a maioria dos pilotos FPV migra para o Acro Mode.
Por que a latência importa
O voo FPV depende fortemente de baixa latência.
Latência é o atraso entre:
- comando do piloto
- resposta do drone
- transmissão de vídeo
Alta latência torna o FPV difícil e desconfortável.
É por isso que sistemas modernos focam muito em:
- comunicação rápida
- transmissão de vídeo rápida
- processamento rápido pelo controlador de voo
O loop contínuo de controle
Agora vamos simplificar todo o processo.
Durante o voo, o drone executa continuamente este loop:
- Comando do piloto
- Receptor recebe os comandos
- Controlador de voo processa as informações
- Giroscópio mede o movimento
- Controlador de voo calcula correções
- ESC ajusta a velocidade dos motores
- Motores giram as hélices
- Drone reage
- Giroscópio mede o novo movimento
- O loop se repete milhares de vezes por segundo
Esse é o coração do voo FPV moderno.
Por que entender isso é importante
Muitos iniciantes tentam aprender FPV apenas por meio de:
- tutoriais
- configurações copiadas
- vídeos aleatórios no YouTube
Mas quando algo dá errado, eles se sentem perdidos.
Entender o processo de controle muda tudo.
Depois que você entende:
- como os comandos viajam
- como a estabilização funciona
- como o controle dos motores funciona
você começa a pensar como um construtor de sistemas, não apenas como um usuário de drone.
Esse é um dos maiores objetivos desta série.
Equívocos comuns de iniciantes
“Os motores seguem diretamente os sticks”
Não exatamente.
O controlador de voo modifica constantemente o comportamento dos motores para estabilizar o drone.
Os motores respondem tanto a:
- comando do piloto
- cálculos de estabilização
“O drone voa automaticamente”
Drones FPV exigem controle constante do piloto.
Especialmente no Acro Mode.
O piloto controla ativamente a aeronave o tempo todo.
“Mais potência automaticamente significa melhor voo”
Potência excessiva pode, na verdade, dificultar o aprendizado.
Controle e consistência são mais importantes do que velocidade bruta para iniciantes.
É por isso que nossa montagem foca em uma configuração equilibrada e amigável para iniciantes.
Conclusão
Um drone FPV moderno é um sistema de controle em tempo real incrivelmente rápido.
Todo movimento começa com o piloto, passa pelo sistema de comunicação, é processado pelo controlador de voo e finalmente se transforma em empuxo dos motores.
Todo esse loop acontece continuamente milhares de vezes por segundo.
Depois que você entende esse processo, drones FPV deixam de parecer máquinas complicadas e passam a ser sistemas lógicos que você pode entender, diagnosticar e, com o tempo, dominar.
Agora que você entende como drones FPV realmente funcionam, o próximo passo é entender os diferentes estilos de voo e como eles influenciam as escolhas de projeto do drone.
No próximo capítulo, vamos explorar as principais categorias do FPV e entender as diferenças entre:
- freestyle
- racing
- cinematic
- long-range FPV
Próximo capítulo
Freestyle, racing, cinematic e long range: escolhendo a direção certa no FPV