Depois de analisar cada subsistema UAV individualmente, o próximo nível de maturidade em engenharia é entender como eles operam simultaneamente sob restrições reais.
Em projetos UAV do mundo real, subsistemas não se comportam de forma isolada.
Eles interagem continuamente, competem por recursos e influenciam uns aos outros de maneiras que muitas vezes não são óbvias.
A verdadeira engenharia UAV começa quando paramos de pensar em componentes e começamos a pensar em comportamento dinâmico de sistema.
Interação simultânea: um sistema em tempo real
Um UAV em voo não é uma coleção de subsistemas operando em sequência.
Ele é um sistema em tempo real onde:
- a propulsão gera empuxo
- a energia distribui corrente variável
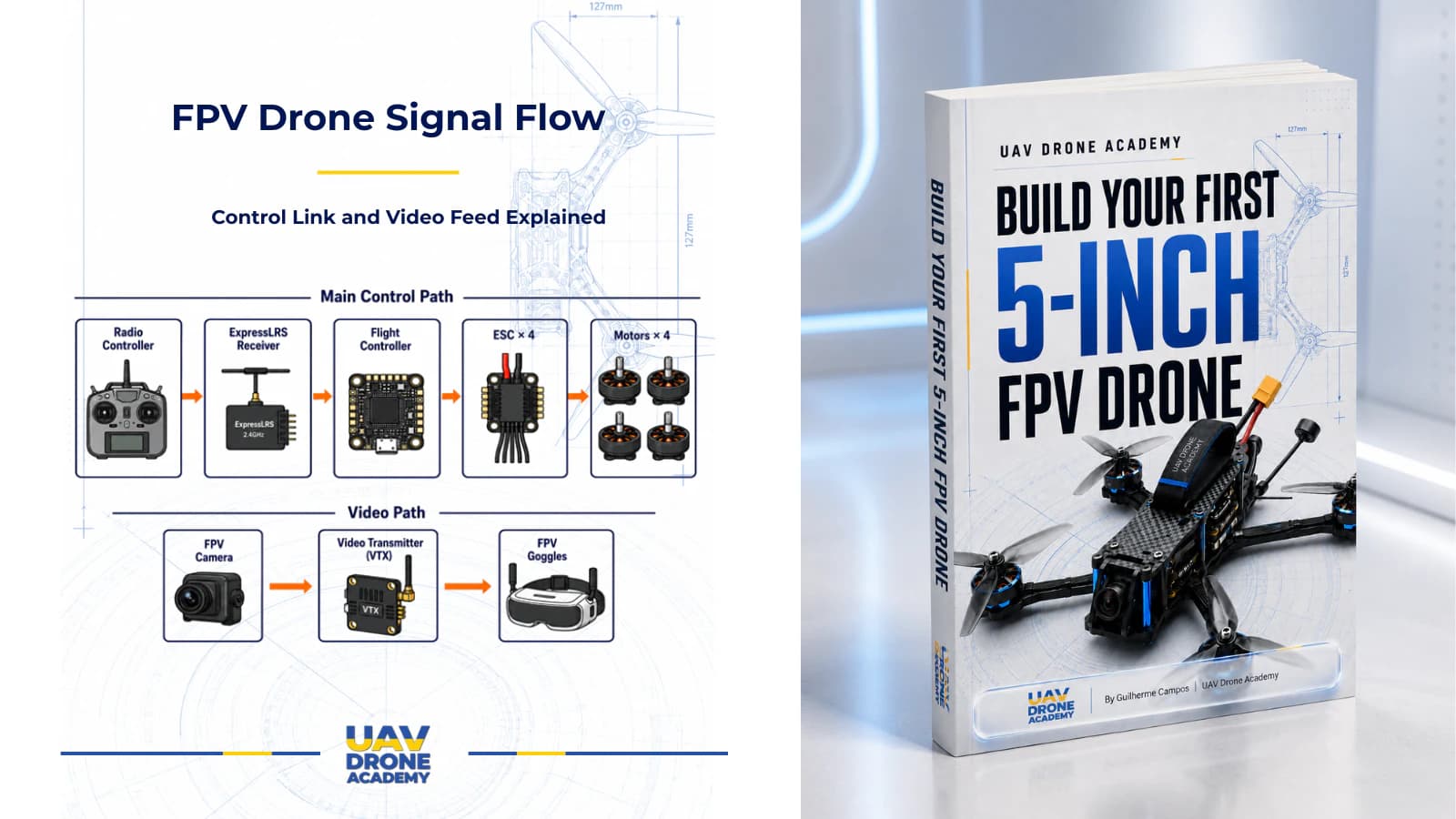
- o controle de voo processa dados ruidosos dos sensores
- a comunicação transmite comandos e telemetria
- a carga útil gera dados e consome energia
Tudo isso acontece ao mesmo tempo.
Uma mudança em um subsistema se propaga instantaneamente pelo restante do sistema.
Onde conflitos reais surgem
Conflitos entre subsistemas normalmente surgem nas interfaces.
Energia vs propulsão
Maior demanda de empuxo aumenta o consumo de corrente, o que:
- causa voltage sag
- introduz ruído elétrico
- impacta a estabilidade do controlador de voo
Carga útil vs autonomia
Adicionar um sensor mais pesado:
- desloca o centro de gravidade
- aumenta o empuxo necessário
- reduz o tempo de voo
Comunicação vs estrutura
Fibra de carbono melhora a rigidez, mas:
- atenua sinais de rádio
- altera padrões de radiação das antenas
Vibração vs controle
Frames mais rígidos reduzem flexão, mas:
- podem deslocar frequências de ressonância
- afetar a qualidade do sinal da IMU
Esses conflitos são normais — eles não são falhas de projeto.
Eles são realidades de integração.
Propagação de decisões: consequências de engenharia
Quando um engenheiro altera um parâmetro, múltiplos subsistemas reagem.
Por exemplo, aumentar o diâmetro da hélice pode:
- melhorar a eficiência de empuxo
- aumentar a demanda de torque
- elevar o estresse estrutural
- mudar o perfil de descarga da bateria
Fazer upgrade para uma câmera de maior resolução pode:
- aumentar a demanda de largura de banda
- aumentar o consumo de energia
- exigir gerenciamento térmico
Toda decisão tem efeitos secundários e terciários.
Essa propagação é o que define a integração de sistemas.
Engenharia sob restrições
Projetos UAV reais operam sob restrições como:
- limites de peso
- limites regulatórios
- margens térmicas
- restrições de orçamento
- condições ambientais
A otimização raramente se trata de maximizar desempenho.
Ela trata de alcançar o sucesso da missão dentro de limites definidos.
Esse raciocínio em nível de sistema se constrói diretamente sobre os fundamentos de subsistemas discutidos em:
- Entendendo a arquitetura UAV: subsistemas e integração
- Integração de carga útil UAV: projeto de missão e trade-offs de sistema
Como engenheiros pensam integração
Engenheiros UAV experientes perguntam:
- Qual subsistema se torna o gargalo primeiro?
- Onde estão as margens mais apertadas?
- Qual é o modo de falha dominante?
- Como o estresse ambiental ampliará fraquezas?
Eles pensam em termos de:
- margens
- acoplamento
- estabilidade
- trade-offs
Não apenas peças.
O que vem a seguir?
Agora que entendemos como subsistemas interagem sob restrições reais, o próximo passo é formalizar essas interações.
No próximo artigo, vamos explorar:
Integração de sistemas UAV: gerenciando interdependências e trade-offs
Isso levará a análise descritiva de interação para frameworks estruturados de decisão em engenharia.