No capítulo anterior, conectamos o receptor ExpressLRS ao rádio controle por meio do processo de binding.
Esse foi um passo importante.
Mas o binding sozinho não significa que o drone está pronto para voar.
Depois do binding, ainda precisamos confirmar que o Betaflight consegue ler corretamente os comandos vindos do rádio controle.
Este capítulo é onde verificamos se os comandos do piloto estão chegando corretamente ao controlador de voo.
Vamos verificar:
- comunicação do receptor
- movimento dos sticks
- channel mapping
- throttle, roll, pitch e yaw
- canais AUX
- switch de Arm
- modos de voo básicos
- comportamento de failsafe
Este é um dos capítulos de configuração mais importantes de todo o curso.
Por quê?
Porque a configuração do receptor define como o piloto realmente controla o drone.
Se essa configuração estiver errada, o drone pode:
- não armar
- responder incorretamente
- ignorar comandos dos switches
- entrar em failsafe inesperadamente
- comportar-se de forma perigosa
Para iniciantes, o objetivo não é configurar todas as funções avançadas do rádio.
O objetivo é simples:
garantir que o drone entenda corretamente o rádio controle e responda com segurança.
Segurança primeiro
Antes de fazer qualquer coisa neste capítulo, confirme:
as hélices estão removidas
Esta ainda é a regra de segurança mais importante.
Durante a configuração do receptor, você pode configurar:
- switch de Arm
- modos de voo
- endpoints dos canais
- comportamento de failsafe
- outras funções de controle
Se algo estiver errado, os motores podem se comportar de forma inesperada depois.
Nunca configure funções de receptor ou motor com hélices instaladas.
Também confirme:
- drone sobre uma superfície estável
- antena do VTX instalada se for energizar com LiPo
- bateria desconectada, a menos que seja necessária
- rádio controle ligado
- receptor bindado
- Betaflight conecta corretamente
Para a maioria das verificações de receptor, o drone pode precisar de energia da LiPo porque alguns receptores não ligam apenas pelo USB.
Se você conectar uma LiPo, use hábitos seguros e mantenha as hélices removidas.
O que já configuramos
Antes de entrar na aba Receiver, os capítulos anteriores já devem estar completos.
Você deve ter:
- conectado o receptor a uma UART
- habilitado Serial RX na UART correta na aba Ports
- selecionado Serial-based receiver mode
- selecionado CRSF como receiver provider para ExpressLRS
- bindado o receptor ao rádio controle
A documentação do ExpressLRS também afirma que receptores ELRS baseados em UART usam CRSF para se comunicar com controladores de voo, então CRSF é o receiver provider correto para esta montagem.
Agora precisamos verificar se tudo funciona na prática.
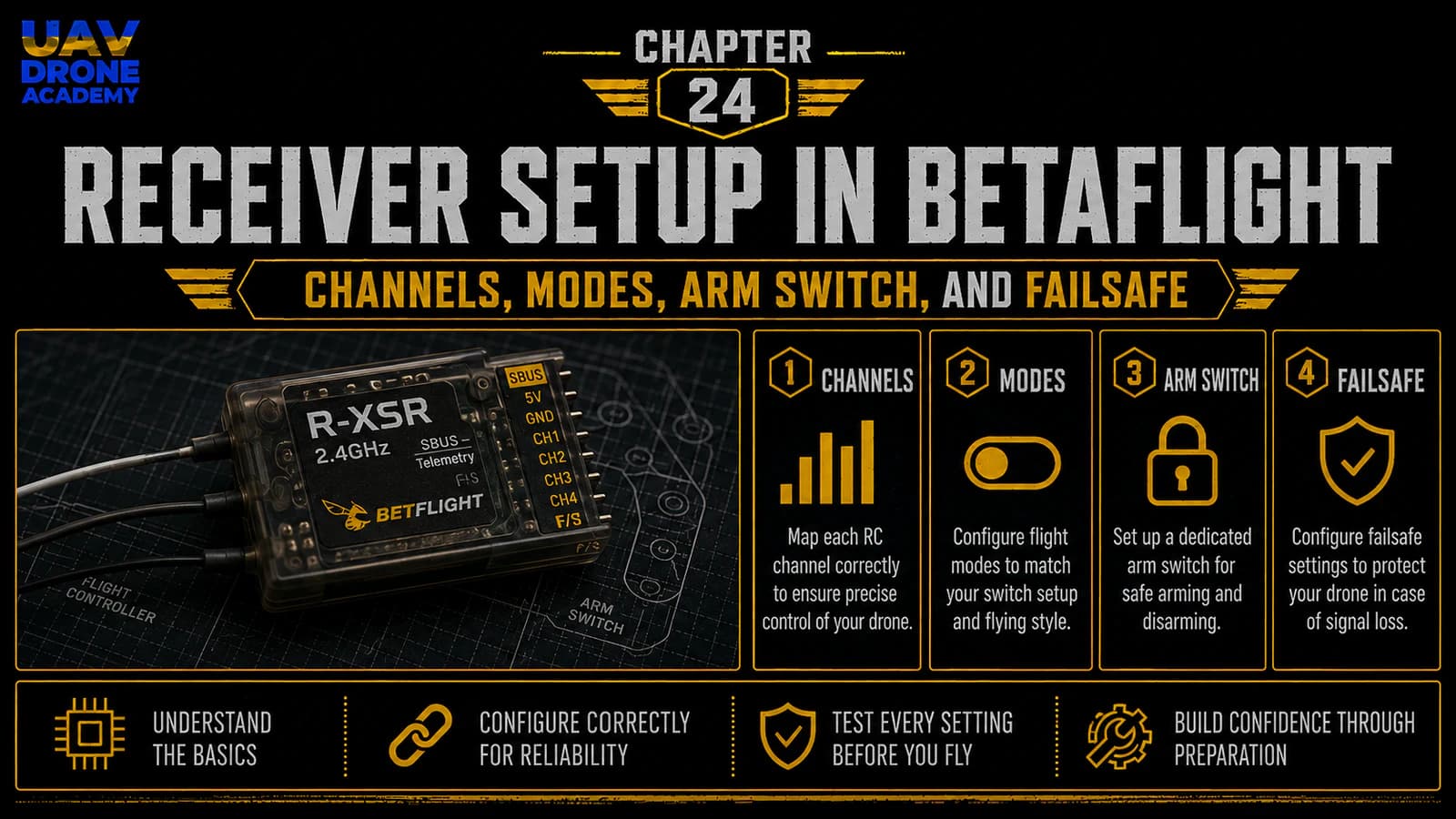
Passo 1 — Abra a aba Receiver
Conecte o drone ao Betaflight.
Depois abra:
Receiver Tab
Esta aba mostra os sinais de entrada ao vivo que o Betaflight recebe do rádio controle.
Você deve ver canais como:
- Roll
- Pitch
- Yaw
- Throttle
- canais AUX
A aba Receiver do Betaflight é usada especificamente para configurar o tipo de receptor, visualizar valores dos canais, verificar resposta de entrada e confirmar o comportamento do receptor.
Passo 2 — Ligue o rádio controle
Ligue o rádio controle.
Certifique-se de que o modelo correto está selecionado.
Para nossa montagem, o modelo selecionado deve usar:
- ExpressLRS
- o módulo ELRS interno ou externo correto
- faixa de frequência correta
- binding phrase correta ou bind concluído
- configuração básica de canais para multirotor
Se o modelo errado estiver selecionado no rádio, o Betaflight pode não receber os dados de canais esperados.
Passo 3 — Energize o receptor
Se o seu receptor liga pelo USB, ele talvez já esteja ativo.
Se não, conecte a bateria LiPo com segurança.
Antes de conectar a LiPo:
- hélices removidas
- antena do VTX instalada
- drone em uma superfície segura
- nenhum fio solto
- smoke stopper, se desejar
Depois de energizado, o receptor deve conectar ao rádio controle.
O comportamento do LED do receptor depende do modelo específico, mas você deve ver alguma indicação de que ele está energizado e conectado.
Passo 4 — Verifique o movimento dos sticks
Agora mova os sticks do rádio lentamente e observe a aba Receiver.
Você deve ver movimento em:
Roll
Stick direito para esquerda e direita em rádios Mode 2.
Pitch
Stick direito para frente e para trás em rádios Mode 2.
Yaw
Stick esquerdo para esquerda e direita em rádios Mode 2.
Throttle
Stick esquerdo para cima e para baixo em rádios Mode 2.
Para a maioria dos pilotos FPV, Mode 2 é o layout de controle padrão:
- stick esquerdo: throttle e yaw
- stick direito: pitch e roll
Se as barras se moverem corretamente, o Betaflight está lendo o rádio.
Este é um grande marco.
Passo 5 — Se nada se mover
Se a aba Receiver não mostrar movimento dos sticks, não entre em pânico.
Verifique o sistema de forma lógica.
Possíveis causas:
- receptor sem energia
- receptor não bindado
- modelo errado selecionado no rádio
- UART errada configurada
- Serial RX habilitado na UART errada
- fios TX/RX não cruzados corretamente
- protocolo do receptor não configurado como CRSF
- módulo de rádio não ativo
- incompatibilidade de firmware entre TX e RX
Comece pelas verificações simples:
- o LED do receptor está aceso?
- o rádio está conectado?
- o modelo correto está selecionado?
- Serial RX está habilitado na UART correta?
- CRSF está selecionado?
Não altere configurações aleatoriamente.
Faça troubleshooting de um item por vez.
Passo 6 — Entenda o Channel Mapping
Channel mapping informa ao Betaflight qual canal corresponde a cada controle.
Os quatro canais principais de controle normalmente são:
- Aileron
- Elevator
- Throttle
- Rudder
Eles frequentemente são abreviados como:
AETR
ou:
TAER
Sistemas de rádio diferentes podem usar ordens de canais diferentes.
A documentação do Betaflight observa que o channel mapping pode ser configurado na aba Receiver ou pelo comando map na CLI.
Exemplos comuns de Channel Map
AETR
- Aileron = Roll
- Elevator = Pitch
- Throttle = Throttle
- Rudder = Yaw
TAER
- Throttle = Throttle
- Aileron = Roll
- Elevator = Pitch
- Rudder = Yaw
Se o channel map errado estiver selecionado, mover um stick pode controlar a função errada no Betaflight.
Por exemplo:
- mover throttle pode mover roll
- mover yaw pode mover pitch
- mover roll pode mover throttle
Isso precisa ser corrigido antes de continuar.
Passo 7 — Verifique cada controle separadamente
Mova apenas um eixo de stick por vez.
Verifique:
Stick de Roll
Apenas Roll deve se mover.
Stick de Pitch
Apenas Pitch deve se mover.
Stick de Throttle
Apenas Throttle deve se mover.
Stick de Yaw
Apenas Yaw deve se mover.
Se a barra errada se mover, ajuste o channel map até que os controles correspondam corretamente.
Não continue até que os quatro controles principais estejam corretos.
Passo 8 — Verifique os valores centrais dos canais
Quando os sticks estão centralizados, Roll, Pitch e Yaw normalmente devem ficar próximos de:
1500
Throttle baixo normalmente deve ficar próximo de:
1000
A deflexão total dos sticks normalmente deve chegar perto de:
1000 a 2000
Os valores exatos podem variar um pouco.
Configurações modernas de ExpressLRS e EdgeTX normalmente já ficam próximas o suficiente por padrão.
Se os valores estiverem muito fora, talvez você precise calibrar o rádio ou ajustar endpoints.
Para iniciantes, não fique obcecado com diferenças mínimas imediatamente.
Foque primeiro na direção correta e na faixa normal.
Passo 9 — Verifique a direção dos sticks
Mova cada stick e confirme que a direção faz sentido.
Por exemplo:
- roll para a direita deve aumentar roll para a direita
- pitch para frente deve mover pitch para frente
- yaw para a direita deve mover yaw para a direita
- throttle para cima deve aumentar throttle
Se um controle se mover ao contrário, corrija no rádio ou no Betaflight usando o método correto para sua configuração.
Não ignore controles invertidos.
Um eixo de controle invertido pode tornar o drone impossível de voar com segurança.
Passo 10 — Entenda os canais AUX
Canais AUX são canais extras controlados por switches, sliders ou botões no rádio.
Eles são usados para funções como:
- Arm
- Angle Mode
- Horizon Mode
- Beeper
- Flip Over After Crash
- GPS Rescue
- Turtle Mode
- outros recursos
Para nossa montagem iniciante, a função AUX mais importante é:
Arm
Sem um switch de Arm configurado corretamente, o drone não consegue entrar com segurança no modo pronto para voo.
Passo 11 — Escolha um switch de Arm
O switch de Arm deve ser fácil de alcançar, mas difícil de acionar por acidente.
Muitos pilotos usam um switch de duas posições para armar.
Um bom switch de Arm deve ser:
- fisicamente claro
- fácil de memorizar
- não compartilhado com outras funções
- consistente em modelos futuros
- fácil de desligar rapidamente
Para iniciantes, não use um botão momentâneo para Arm.
Use uma posição estável de switch.
Passo 12 — Abra a aba Modes
Agora vá para:
Modes Tab
A aba Modes é onde o Betaflight atribui funções aos canais AUX.
A documentação do Betaflight explica que Modes são usados para habilitar ou desabilitar recursos e acionar ações do controlador de voo usando faixas de canais AUX.
Isso significa que, quando um switch entra em uma faixa definida, o modo correspondente se torna ativo.
Passo 13 — Adicione o modo Arm
Na aba Modes:
- Encontre ARM.
- Clique em Add Range.
- Selecione o canal AUX controlado pelo seu switch de Arm escolhido.
- Mova o switch e observe o marcador.
- Defina a faixa ativa onde você quer que Arm seja ativado.
- Salve.
O modo Arm deve ativar apenas quando o switch for movido deliberadamente para a posição armada.
Quando o switch estiver desligado, Arm deve ficar inativo.
Passo 14 — Teste o switch de Arm no Betaflight
Com as hélices removidas, mova o switch de Arm e observe o Betaflight.
Você deve ver o modo ARM ativar quando o switch estiver na posição armada.
Mova o switch de volta.
ARM deve desativar.
Faça isso várias vezes.
Você quer que o comportamento do switch seja óbvio e confiável.
Conceito importante de segurança do Arm
O switch de Arm é um dos controles de segurança mais importantes do drone.
Quando o drone está armado, os motores podem girar.
Mesmo em idle, o drone deve ser tratado como ativo.
É por isso que as hélices devem permanecer removidas durante a configuração.
Depois, quando as hélices forem instaladas, o switch de Arm precisará ser tratado com muita atenção.
Passo 15 — Adicione Angle Mode para iniciantes
Mesmo que a maioria dos pilotos FPV acabe voando em Acro Mode, Angle Mode pode ser útil nos primeiros testes.
Angle Mode é um modo de auto nivelamento.
Ele ajuda o drone a voltar em direção ao nível quando os sticks estão centralizados.
Para iniciantes, isso pode ser útil durante os primeiros testes de hover.
Para adicionar Angle Mode:
- Encontre ANGLE na aba Modes.
- Clique em Add Range.
- Atribua a um switch ou posição de switch.
- Salve.
Se nenhum modo Angle ou Horizon estiver ativo, o drone normalmente voa em Acro Mode.
Passo 16 — Devemos usar Horizon Mode?
Horizon Mode é um modo híbrido.
Ele fornece algum auto nivelamento, mas permite movimentos mais agressivos quando os sticks são empurrados até o fim.
Para iniciantes, pode ser útil, mas não é obrigatório.
Nossa configuração iniciante pode começar com:
- switch de Arm
- Angle Mode opcional
- possivelmente Beeper depois
- possivelmente Flip Over After Crash depois
Não sobrecarregue o rádio com modos demais imediatamente.
Simples é melhor.
Passo 17 — Entendendo Acro Mode
Acro Mode é o modo FPV manual padrão.
Em Acro Mode, o drone não se auto nivela.
O piloto controla diretamente a rotação.
A maior parte do voo FPV freestyle acontece em Acro Mode.
Mas Acro exige prática.
Para os primeiros testes de hover, Angle Mode pode reduzir o estresse.
Depois, pilotos devem praticar Acro em simulador antes de voar agressivamente.
Passo 18 — Adicione Beeper Mode se disponível
Se seu drone tem um buzzer ou DShot Beacon configurado depois, um switch de Beeper pode ser útil.
O Beeper ajuda a localizar o drone depois de uma queda.
Se sua montagem não inclui um buzzer físico, DShot Beacon ainda pode permitir que os motores emitam bipes, dependendo do suporte do ESC e da configuração.
Por enquanto, a configuração do Beeper é opcional.
Podemos revisitá-la depois.
Passo 19 — Não configure modos demais agora
Iniciantes frequentemente adicionam modos demais cedo demais.
Isso cria confusão.
Por enquanto, priorize:
- Arm
- Angle Mode, opcional
- Beeper, opcional
Isso é suficiente para a configuração inicial.
Modos avançados podem vir depois.
Passo 20 — Salve os Modes
Depois de definir as faixas, clique em:
Save
Então mova cada switch novamente e confirme se os indicadores ativos funcionam corretamente.
Não assuma que a configuração foi salva corretamente.
Sempre verifique.
Passo 21 — Entendendo Failsafe
Failsafe é o sistema que é ativado se o controle de rádio for perdido.
Isso é extremamente importante.
Se o link de rádio falhar, o drone não deve continuar voando sem controle.
O Betaflight fornece comportamento de failsafe para gerenciar esse risco caso o link de rádio seja perdido, o receptor falhe ou o receptor desconecte.
Para uma montagem FPV freestyle básica, o comportamento seguro mais comum para iniciantes é:
desarmar e cair
Isso significa que, se o sinal de controle for perdido, o drone para os motores em vez de voar sem controle.
Por que failsafe importa
Sem comportamento correto de failsafe, a perda de sinal pode causar:
- flyaway
- voo descontrolado
- dano a propriedade
- risco de ferimentos
- perda do drone
- situações perigosas de recuperação
Failsafe não é opcional.
Ele precisa ser verificado antes do voo.
Passo 22 — Estágios de failsafe no Betaflight
A documentação do Betaflight descreve o failsafe como um sistema em estágios.
O Stage 1 pode ocorrer quando os dados do receptor se tornam inválidos ou o sinal é perdido por um curto período; se o sinal não se recuperar, o comportamento de failsafe configurado continua.
Para iniciantes, o conceito simplificado é:
- O Betaflight detecta perda de sinal.
- Ele aguarda brevemente para confirmar o problema.
- Ele executa a ação de failsafe configurada.
Para nossa montagem iniciante, essa ação normalmente deve ser desarmar/cair.
Passo 23 — Verifique as configurações de failsafe
Abra a aba Failsafe, se ela estiver disponível na sua versão do Betaflight.
Para um drone freestyle básico de 5 polegadas para iniciantes, confirme que o comportamento de failsafe está definido para uma opção segura.
Na maioria das configurações freestyle iniciantes, isso significa:
- sem GPS Rescue ainda
- sem comportamento autônomo avançado
- sem descida com throttle fixo
- comportamento básico de desarmar/cair
GPS Rescue exige hardware GPS e configuração cuidadosa.
Nossa montagem minimalista não inclui GPS nesta etapa.
Então não configure GPS Rescue agora.
Passo 24 — Teste failsafe com cuidado
O teste de failsafe deve ser feito com cuidado.
Com as hélices removidas:
- Conecte o Betaflight.
- Energize o receptor.
- Confirme que o movimento dos sticks funciona.
- Desligue o rádio ou desative o transmissor com cuidado.
- Observe o status no Betaflight.
- Confirme que a perda de sinal do receptor é detectada.
- Ligue o rádio novamente.
- Confirme que o sinal retorna.
Não teste failsafe ao ar livre com hélices instaladas nesta etapa.
Failsafe precisa ser verificado primeiro com segurança na bancada.
Passo 25 — Entendendo Arming Disable Flags
Às vezes, o drone se recusa a armar.
Isso nem sempre é um problema.
O Betaflight inclui sistemas de prevenção de arming para impedir armamento inseguro.
Por exemplo, a documentação do Betaflight lista arming prevention flags como RXLOSS, que significa que nenhum sinal válido do receptor foi detectado, e BADRX/NOT_DISARMED, que pode ocorrer quando o receptor se recupera de failsafe enquanto o switch de arm ainda está ligado.
Para iniciantes, isso é útil.
Se o drone não armar depois, o Betaflight normalmente informa o motivo.
Não desabilite imediatamente recursos de segurança.
Leia o motivo de arming disable e corrija o problema real.
Passo 26 — Verificação final do receptor
Antes de sair deste capítulo, verifique:
Sticks
- roll funciona corretamente
- pitch funciona corretamente
- yaw funciona corretamente
- throttle funciona corretamente
Canais
- channel map correto
- direção correta dos sticks
- faixas normais dos canais
Switches
- switch de Arm funciona
- switch de Angle Mode funciona, se configurado
- switch de Beeper funciona, se configurado
Failsafe
- perda de sinal é detectada
- comportamento seguro de failsafe está configurado
- nenhuma hélice instalada
Isso confirma que o sistema do receptor está funcionando corretamente.
O que ainda não estamos fazendo
Neste capítulo, ainda não estamos:
- testando motores
- configurando direção dos motores
- instalando hélices
- configurando OSD
- ajustando PID
- voando o drone
Essas etapas vêm depois.
A configuração do receptor precisa estar correta antes dos testes de motor começarem.
Erros comuns de iniciantes
Bindar o receptor, mas não verificar no Betaflight
Binding não é suficiente.
Você precisa verificar o movimento dos sticks dentro do Betaflight.
Habilitar o Channel Map errado
Se as barras erradas se movem, o channel map está errado.
Corrija antes de continuar.
Configurar Arm em um switch confuso
Arm deve ser fácil de entender e rápido de desativar.
Não use um switch confuso.
Adicionar modos demais cedo demais
Mais modos criam mais confusão.
Comece simples.
Ignorar failsafe
Failsafe é um requisito de segurança.
Não pule esta etapa.
Testar com hélices instaladas
Nunca configure receptor, modes ou failsafe com hélices instaladas.
Checklist de configuração do receptor para iniciantes
Antes de seguir para o próximo capítulo, confirme:
- hélices removidas
- rádio controle ligado
- modelo correto selecionado no rádio
- receptor bindado
- receptor energizado
- aba Receiver do Betaflight mostra movimento dos sticks
- roll, pitch, yaw e throttle se movem corretamente
- channel map correto
- direção dos sticks correta
- throttle baixo e valores centrais parecem normais
- canais AUX se movem quando os switches são movidos
- switch de Arm atribuído
- modo Arm ativa apenas na posição pretendida do switch
- Angle Mode configurado, se desejado
- comportamento de failsafe verificado
- nenhum teste de motor realizado ainda
Se tudo isso estiver correto, a configuração do receptor está completa.
O que concluímos
Nesta etapa, nós:
- verificamos a comunicação de rádio no Betaflight
- verificamos o movimento dos sticks
- confirmamos o channel mapping
- verificamos as direções dos controles
- configuramos o switch de Arm
- opcionalmente configuramos Angle Mode
- introduzimos a configuração de Beeper
- revisamos o comportamento de failsafe
- preparamos o drone para configuração dos motores
Este é um grande passo em direção à prontidão para voo.
Os comandos do rádio do piloto agora estão chegando corretamente ao controlador de voo.
Nossa filosofia daqui em diante
A mesma estratégia continua:
verifique antes de avançar
Não assuma que algo funciona.
Confira.
Confirme.
Salve.
Teste com segurança.
É assim que iniciantes constroem confiança e evitam erros perigosos.
Conclusão
A configuração do receptor é uma das partes mais importantes da configuração de um drone FPV de 5 polegadas.
É aqui que o rádio controle se torna uma interface real de controle da aeronave.
Neste capítulo, verificamos:
- comunicação do receptor
- movimento dos sticks
- channel mapping
- canais AUX
- switch de Arm
- modos de voo básicos
- comportamento de failsafe
Para iniciantes, as lições mais importantes são:
- binding não é suficiente
- o Betaflight precisa mostrar movimento correto dos sticks
- Arm precisa ser configurado com segurança
- failsafe precisa ser verificado
- as hélices devem permanecer removidas durante a configuração
Agora que o sistema do receptor está funcionando, estamos prontos para configurar o sistema dos motores.
No próximo capítulo, vamos verificar a ordem dos motores, a direção dos motores e a configuração das hélices no Betaflight.
Próximo capítulo
Direção dos motores e configuração das hélices no Betaflight