Beginner, Controllers, Firmware, Flight Control, Sensors, System
UAV Flight Control Systems: Sensors, Controllers, and Firmware Logic
After defining structure, propulsion, and power, a UAV finally gains the ability to sense, decide, and react.
This capability is delivered by the flight control system, the subsystem responsible for stabilizing the aircraft and translating pilot or autonomous commands into controlled motion.
In UAV engineering, flight control is not just software. It is the integration of sensors, hardware, firmware, and control logic, all operating within physical and electrical constraints.
The Role of Flight Control in a UAV System
As established in Understanding UAV Architecture: Subsystems and Integration, the flight control system sits at the center of the UAV architecture.
It interfaces directly with:
- Sensors that describe the UAV’s state
- Actuators that generate motion
- Communication links that carry commands
- Power systems that sustain operation
If flight control fails, the UAV fails — regardless of how good the other subsystems are.
Sensors: How the UAV Perceives the World
Flight control begins with sensing.
Common sensors include:
- Inertial Measurement Units (IMUs) – accelerometers and gyroscopes
- Magnetometers – heading reference
- Barometers – altitude estimation
- GNSS receivers – global positioning
Sensor data is always noisy and imperfect.
The task of flight control is not to eliminate noise, but to manage uncertainty reliably.
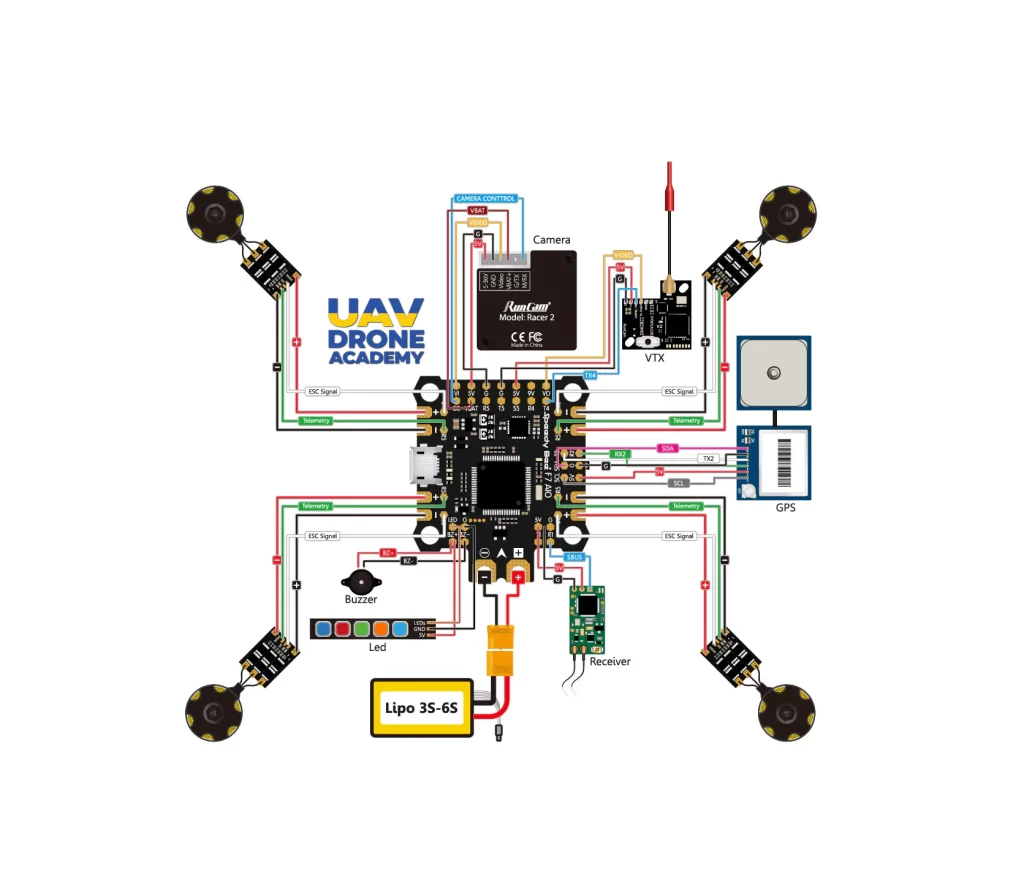
The Flight Controller Hardware
The flight controller is the physical platform where sensing, computation, and control converge.
It typically includes:
- A microcontroller or processor
- Sensor interfaces
- Communication ports
- Power regulation and filtering
Hardware quality affects:
- Sensor fidelity
- Timing precision
- Resistance to electrical noise
This is why flight controller placement and power quality — discussed in earlier articles — are critical.
Firmware and Control Logic
Firmware defines how the UAV behaves.
This includes:
- Sensor fusion algorithms
- Control loops (rate, attitude, position)
- Failsafe logic
- Interface with propulsion and communication systems
Good firmware does not compensate for bad hardware or poor power design.
It assumes that structural, electrical, and mechanical fundamentals are already sound.
Control Loops and Stability
At its core, flight control relies on feedback loops.
These loops continuously:
- Measure the UAV’s state
- Compare it to a desired state
- Apply corrective actions
Stability depends on:
- Sensor quality
- Timing consistency
- Mechanical vibration levels
- Propulsion responsiveness
This is why flight control performance reflects the entire system, not just tuning parameters.
Common Misconceptions About Flight Control
Some frequent misunderstandings include:
- Believing firmware alone determines stability
- Treating tuning as trial-and-error rather than diagnosis
- Ignoring vibration and power noise
- Assuming one configuration fits all airframes
Flight control is a system problem — not a preset problem.
What Comes Next?
Once the UAV can sense and control its motion, the next challenge is reliable communication.
In the following article, we will explore:
This will connect control logic to command, feedback, and situational awareness.
Pingback: UAV Power Systems: Batteries, Power Distribution, and Noise Management | UAV Drone Academy
Pingback: Understanding UAV Architecture: Subsystems and Integration | UAV Drone Academy
Pingback: UAV System Integration: Managing Interdependencies and Trade-Offs | UAV Drone Academy