Once you understand that a UAV is a system, the next critical step is learning how that system is structured and integrated.
UAV architecture is not about individual components in isolation — it is about how subsystems interact, depend on each other, and fail together.
This system-level perspective is essential for anyone moving from basic operation toward UAV engineering, design, or professional deployment.
From Definition to Architecture
In our previous article, What Is a UAV? A System-Level Introduction, we established that a UAV is more than a flying object — it is part of a broader Unmanned Aircraft System (UAS).
Architecture answers the next question:
How is this system organized, and how do its parts work together in real conditions?
Core UAV Subsystems
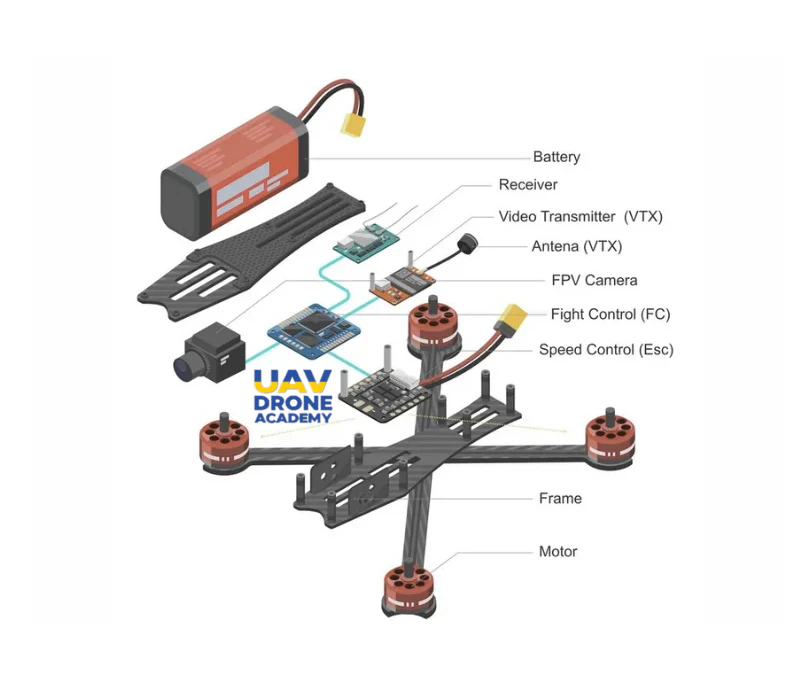
Although UAV designs vary widely, most systems share a common architectural structure composed of six core subsystems.
1. Airframe
The airframe provides structural support and defines:
- Aerodynamic behavior
- Weight distribution
- Component placement
Design choices here affect vibration, cooling, signal integrity, and survivability.
UAV Airframe Design: Structure, Materials, and Vibration Control
2. Propulsion System
This subsystem converts electrical energy into thrust and includes:
- Motors
- Propellers
- Electronic Speed Controllers (ESCs)
Propulsion is tightly coupled with both power and flight control, making integration critical.
UAV Propulsion Systems: Motors, Propellers, and Thrust Optimization
3. Power System
Often underestimated, the power system includes:
- Batteries
- Power distribution boards
- Voltage regulators
Poor power architecture leads to:
- Brownouts
- Signal noise
- Unstable flight behavior
Many “software problems” are actually power-integration problems.
UAV Power Systems: Batteries, Power Distribution, and Noise Management
4. Flight Control System
This is the UAV’s decision-making core and includes:
- Flight controller hardware
- Sensors (IMU, barometer, magnetometer)
- Firmware and control algorithms
The flight controller sits at the center of the architecture, interfacing with almost every other subsystem.
UAV Flight Control Systems: Sensors, Controllers, and Firmware Logic
5. Communication System
Communication links connect the UAV to the operator and may include:
- Radio control links
- Telemetry
- Video transmission
Range, latency, redundancy, and interference tolerance are all architectural concerns — not just radio specifications.
UAV Communication Systems: Radio Links, Telemetry, and Video Transmission
6. Payload
Payloads define the mission:
- Cameras
- Sensors
- Delivery mechanisms
Payload integration affects center of gravity, power consumption, and overall system stability.
UAV Payload Integration: Mission Design and System Trade-Offs
Integration: Where Most UAVs Fail
Subsystems rarely fail in isolation.
Most real-world UAV failures occur at integration points, such as:
- Power noise affecting sensors
- EMI disrupting communication links
- Poor mechanical isolation causing control instability
Good architecture minimizes coupling where possible and manages unavoidable dependencies deliberately.
This is why simply assembling high-quality components does not guarantee a reliable UAV.
Architecture Is About Trade-Offs
Every UAV design is a series of compromises:
- Weight vs endurance
- Power vs reliability
- Performance vs maintainability
System architecture provides the framework to evaluate these trade-offs logically instead of by trial and error.
From Architecture to Education
Understanding UAV architecture changes how you learn:
- You stop memorizing settings
- You start reasoning about systems
- You diagnose problems instead of guessing
👉 This transition from component-level thinking to system-level reasoning is explored further in our article on academic and practical UAV education.
What Comes Next?
With a clear view of UAV architecture, the next challenge is learning how theory and practice come together in real training environments — and why many educational paths fail to bridge that gap.
Related Articles
- What Is a UAV? A System-Level Introduction
- Academic vs Practical UAV Education: Bridging Theory and Application
- UAV Airframe Design: Structure, Materials, and Vibration Control
- UAV Propulsion Systems: Motors, Propellers, and Thrust Optimization
- UAV Power Systems: Batteries, Power Distribution, and Noise Management
- UAV Flight Control Systems: Sensors, Controllers, and Firmware Logic
- UAV Communication Systems: Radio Links, Telemetry, and Video Transmission
- UAV Payload Integration: Mission Design and System Trade-Offs
Pingback: What Is a UAV? A System-Level Introduction | UAV Drone Academy
Pingback: Welcome to UAV Drone Academy: Bridging Theory and Practice
Pingback: Academic vs Practical UAV Education: Bridging Theory and Application | UAV Drone Academy
Pingback: UAV Airframe Design: Structure, Materials, and Vibration Control - UAV Drone Academy
Pingback: UAV Propulsion Systems: Motors, Propellers, and Thrust Optimization | UAV Drone Academy
Pingback: UAV Power Systems: Batteries, Power Distribution, and Noise Management | UAV Drone Academy
Pingback: UAV Flight Control Systems: Sensors, Controllers, and Firmware Logic | UAV Drone Academy
Pingback: UAV Communication Systems: Radio Links, Telemetry, and Video Transmission | UAV Drone Academy
Pingback: UAV System Integration: How Subsystems Work Together Under Real Constraints | UAV Drone Academy