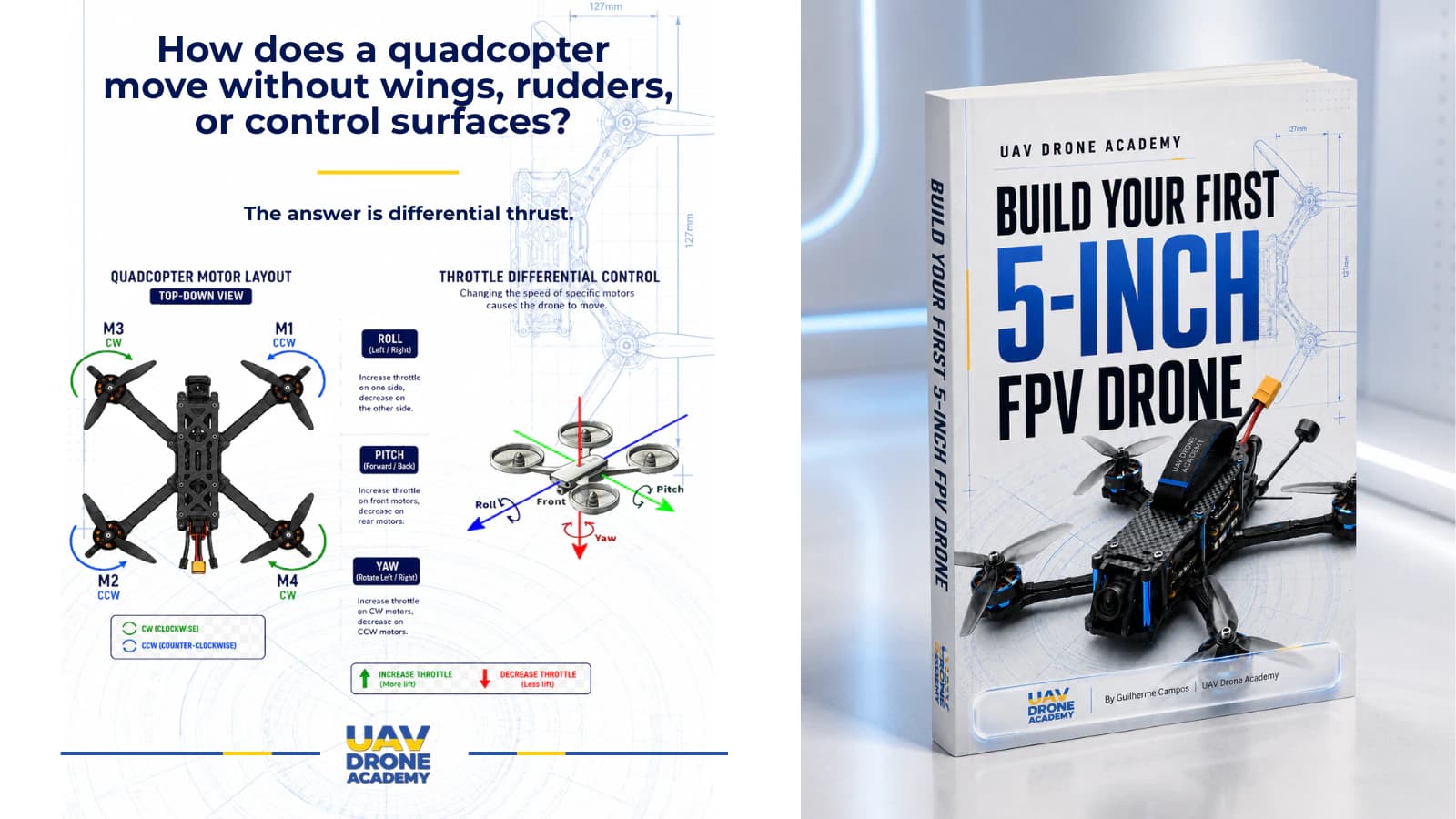
How does a quadcopter move without wings, rudders, or control surfaces?
The answer is:
differential thrust
A quadcopter does not use traditional aircraft control surfaces.
It does not have ailerons.
It does not have elevators.
It does not have a rudder.
Instead, it moves by changing the speed of its motors.
A quadcopter has four motors, and each motor spins a propeller.
By increasing or decreasing the speed of specific motors, the flight controller creates different amounts of thrust at each corner of the drone.
Those thrust differences are what make the drone move.
What Is Differential Thrust?
Differential thrust means creating controlled differences in thrust between motors.
Instead of all four motors producing the exact same amount of thrust all the time, the flight controller constantly adjusts each motor.
Sometimes one side produces more thrust.
Sometimes the opposite side produces less thrust.
Sometimes clockwise-spinning motors change speed relative to counter-clockwise-spinning motors.
These small thrust differences create movement.
The drone does not move because all motors spin the same way.
It moves because the flight controller creates a controlled imbalance.
The Role of the Flight Controller
The pilot gives commands through the radio controller.
But the flight controller does the real-time balancing work.
When the pilot moves the sticks, the flight controller calculates how each motor should respond.
It uses sensor data from the gyro and other onboard systems to understand how the drone is moving.
Then it adjusts motor speed many times per second.
This is why a quadcopter can:
- stay stable
- react quickly
- tilt in any direction
- rotate in place
- recover from small disturbances
- respond precisely to pilot commands
The pilot commands the intention.
The flight controller calculates the motor response.
How a Quadcopter Pitches Forward
Pitch controls forward and backward tilt.
To pitch forward, the drone changes the thrust balance between the front and rear motors.
A simplified way to understand it is:
- the rear motors produce more thrust
- the front motors produce less thrust
- the drone tilts forward
- forward tilt creates forward movement
The drone is not being pulled forward by a wing or pushed by a separate propeller.
It moves forward because the entire aircraft tilts.
Once tilted, part of the thrust points backward and pushes the drone forward.
How a Quadcopter Pitches Backward
Pitching backward works in the opposite direction.
To pitch backward:
- the front motors produce more thrust
- the rear motors produce less thrust
- the drone tilts backward
- the thrust direction changes
- the drone moves backward
This is the same principle as forward pitch, only reversed.
The drone moves by tilting its thrust vector.
How a Quadcopter Rolls Left or Right
Roll controls side-to-side tilt.
To roll right, the drone changes the thrust balance between the left and right sides.
A simplified example:
- the left motors produce more thrust
- the right motors produce less thrust
- the drone tilts right
- the drone moves right
To roll left, the opposite happens:
- the right motors produce more thrust
- the left motors produce less thrust
- the drone tilts left
- the drone moves left
Again, the drone is not using wings or control surfaces.
It is using thrust imbalance.
How a Quadcopter Yaws
Yaw means rotating around the vertical axis.
In simple terms, yaw is how the drone turns its nose left or right while staying mostly in place.
A quadcopter has motors spinning in opposite directions.
Usually, two motors spin clockwise and two motors spin counter-clockwise.
This helps balance torque.
To yaw, the flight controller changes the speed relationship between the clockwise and counter-clockwise motor pairs.
For example:
- one motor pair speeds up
- the opposite motor pair slows down
- torque balance changes
- the drone rotates around its center
This allows the drone to turn without a rudder.
Yaw is created by changing motor torque balance.
Why All Motors Do Not Spin the Same Way
A beginner may think that all motors simply spin faster to move.
That is only partly true.
If all four motors increase speed equally, the drone produces more total upward thrust.
That can make it climb.
But it does not make it pitch, roll, or yaw.
For controlled movement, the motors must change speed differently.
That is the key idea.
A quadcopter moves because of differences between motors.
Not because all motors do the same thing.
Controlled Imbalance Creates Control
A quadcopter is constantly balancing itself.
Perfectly equal thrust would only keep the drone level under ideal conditions.
But real flight is never perfectly still.
The drone is affected by:
- wind
- pilot input
- battery voltage changes
- propeller airflow
- motor response
- frame vibration
- small disturbances
- momentum
The flight controller responds by creating tiny controlled imbalances.
More thrust here.
Less thrust there.
Small correction.
Fast response.
Stable flight.
This is the foundation of quadcopter control.
Why Differential Thrust Matters in FPV
FPV drones are fast and responsive.
They need to react instantly to pilot commands.
Differential thrust is what allows an FPV drone to:
- flip
- roll
- dive
- recover
- turn sharply
- accelerate quickly
- stabilize after movement
- fly in Acro Mode
- perform freestyle maneuvers
Every FPV movement depends on motor speed changes.
The smoother and faster those changes happen, the more connected the drone feels.
Differential Thrust and Acro Mode
In Acro Mode, the pilot controls rotation rate rather than asking the drone to self-level automatically.
When the pilot moves the sticks, the flight controller commands angular movement.
The drone then uses differential thrust to rotate around its axes.
This is why Acro Mode feels direct and powerful.
The drone is not trying to behave like a GPS camera drone.
It is responding to stick commands through controlled motor output.
Differential Thrust and Stability
Even when the pilot is not making large inputs, differential thrust is still working.
The flight controller constantly checks whether the drone is rotating or drifting from the commanded behavior.
If a small disturbance affects the drone, the flight controller adjusts motor speeds to correct it.
This happens very quickly.
The pilot may not even notice many of these corrections.
That is one reason modern FPV drones can feel so stable and responsive when properly configured.
Why Motor Direction Matters
Differential thrust only works correctly when motor order and motor direction are configured properly.
If a motor spins the wrong way, or if Betaflight thinks a motor is in the wrong position, the flight controller may send corrections to the wrong place.
That can cause:
- instant flips
- uncontrolled yaw
- unstable takeoff
- poor control response
- runaway behavior
This is why motor order and motor direction checks are so important before the first flight.
The flight controller can only control the drone correctly if the motor system matches the expected configuration.
Why Propeller Direction Matters
Propellers must also match motor direction.
A motor spinning correctly with the wrong propeller will not produce the correct thrust.
A propeller installed upside down or on the wrong motor can cause the drone to fail during takeoff.
Differential thrust depends on each motor and propeller producing thrust in the expected direction.
That is why propeller setup is part of flight control, not just assembly.
What Beginners Should Remember
For beginners, the main idea is simple:
a quadcopter moves by changing thrust at different motors.
To pitch, it changes thrust between front and rear motors.
To roll, it changes thrust between left and right motors.
To yaw, it changes the relationship between clockwise and counter-clockwise motor pairs.
To climb, all motors increase thrust together.
To descend, all motors reduce thrust together.
This is the basic logic behind quadcopter movement.
Common Beginner Misunderstandings
Thinking the Drone Moves Like an Airplane
A quadcopter does not use wings, elevators, ailerons, or a rudder.
It uses motor speed changes.
Thinking All Motors Always Spin Equally
Equal motor thrust may help the drone hover, but movement requires differences between motors.
Thinking the Pilot Controls Each Motor Directly
The pilot does not manually control each motor.
The pilot gives commands, and the flight controller calculates motor output.
Ignoring Motor Direction
Motor direction is critical.
Wrong motor direction can make differential thrust fail completely.
Ignoring Propeller Orientation
Correct propeller orientation is required for correct thrust.
A wrong prop can cause an instant crash.
Why This Concept Matters Before Building
Understanding differential thrust helps beginners make better decisions during the build.
It explains why:
- motor order matters
- motor direction matters
- propeller direction matters
- the flight controller must be mounted correctly
- Betaflight configuration matters
- vibration affects control
- a balanced build flies better
- small setup mistakes can cause major problems
This concept connects the mechanical build, electronics, software, and flight behavior into one system.
Part of the Book
This content is part of our book:
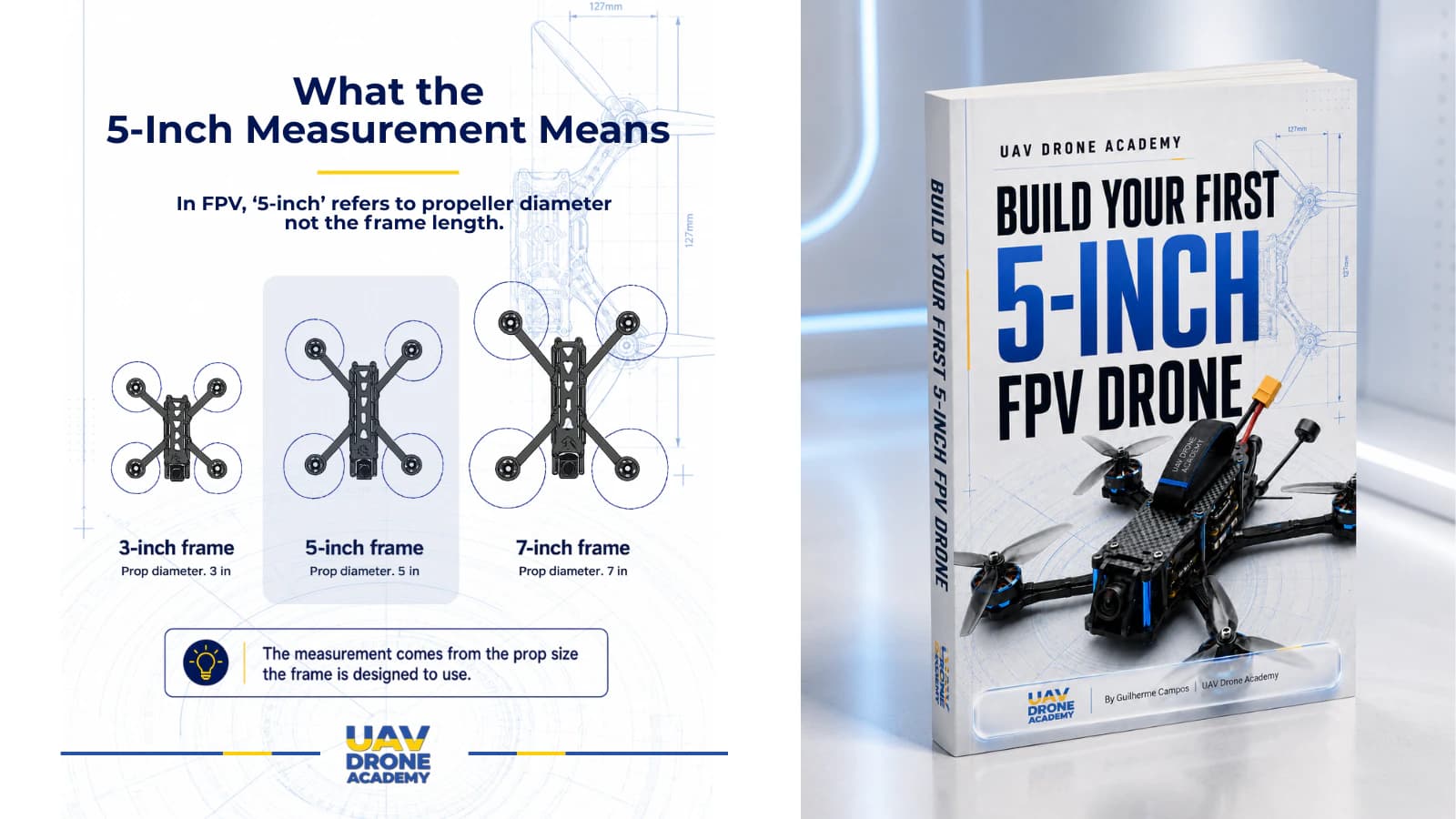
Build Your First 5-Inch FPV Drone │ UAV Drone Academy
A complete beginner’s guide designed to help new pilots understand, build, configure, test, fly, maintain, and upgrade their first 5-inch FPV drone with confidence.
Before you fly, understand how the drone moves.
Conclusion
A quadcopter moves without wings, rudders, or control surfaces because it uses differential thrust.
The flight controller constantly changes the speed of each motor to create controlled thrust differences.
Those differences allow the drone to:
- pitch forward and backward
- roll left and right
- yaw in place
- climb
- descend
- stabilize itself
- respond quickly to pilot commands
The drone does not move because all motors spin the same way.
It moves because the flight controller creates controlled imbalance.
More thrust on one side.
Less thrust on the other.
Precise movement in the air.
That is the foundation of quadcopter control.